








GPSとMAGの接続でコネクターケーブル先端は芯線なのでヘッダーピン取り付け
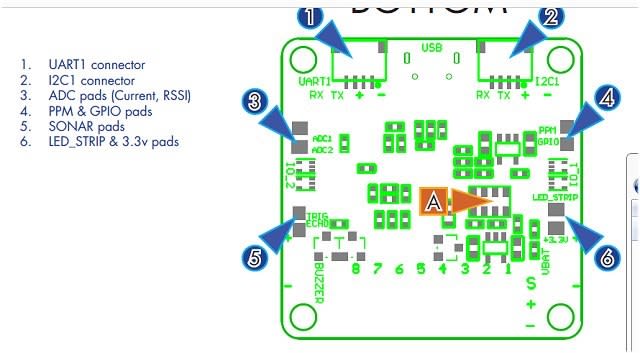
MAG用I2Cも裏側にありました、助かったー!!(笑)
GPS/MAG問題無く動作しました、後はBARO(気圧モジュール)のみ!!

あ~そう言えばNAZE32でかなり時間掛けて煮詰めたPID他調整互換性有るのかな~?
まあノウハウはかなり身についたので新規でも良いけど・・・
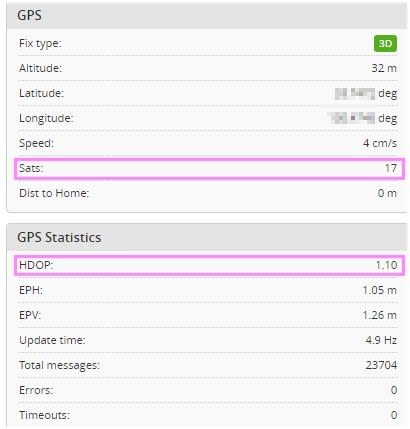
そう言えばF3の処理スピードと関係無いとは思うけどGPS SATS直ぐに16補足していました
GPS処理はユニット内部のモジュールなので気のせいかも・・・
しかし室内ではSATS最高記録です17安定!!・・・わ~ッ・・・・
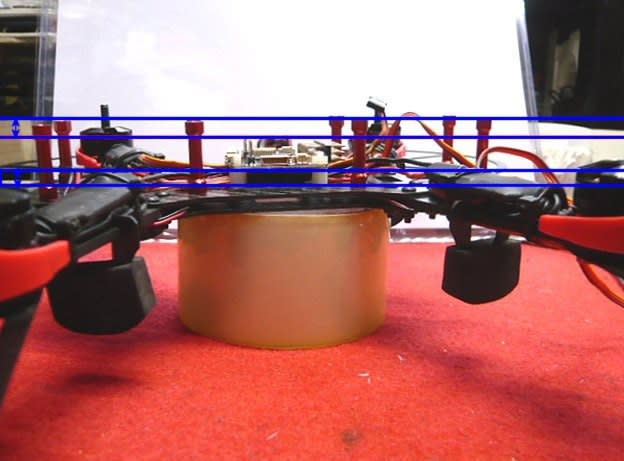
で初めて自作ドローンから思っていたのは普通に考えて 空力、追従性、負荷防止を考えるとペラの水平位置を思えば
何故フレームハイトが大きいのか機材寸法の配慮だったのか?今一不明ですがローハイトは今でも重要な課題でもあります
MAG用I2Cも裏側にありました、助かったー!!(笑)
GPS/MAG問題無く動作しました、後はBARO(気圧モジュール)のみ!!
あ~そう言えばNAZE32でかなり時間掛けて煮詰めたPID他調整互換性有るのかな~?
まあノウハウはかなり身についたので新規でも良いけど・・・
そう言えばF3の処理スピードと関係無いとは思うけどGPS SATS直ぐに16補足していました
GPS処理はユニット内部のモジュールなので気のせいかも・・・
しかし室内ではSATS最高記録です17安定!!・・・わ~ッ・・・・
で初めて自作ドローンから思っていたのは普通に考えて 空力、追従性、負荷防止を考えるとペラの水平位置を思えば
何故フレームハイトが大きいのか機材寸法の配慮だったのか?今一不明ですがローハイトは今でも重要な課題でもあります









