毎度の河川敷でしたが雨が~~止むところを見計らい
ZMR250のGPSテスト~~でEZ-GUIでSATS14補足~が!!
MAGを確認すると90°もズレていました!?
当方室内は以前もお話しましたが強磁界の部屋でコンパスがまともに動かないのです(汗)
野外現地で再度MAGキャリブし・・・あれ~~やはり90°ズレている???
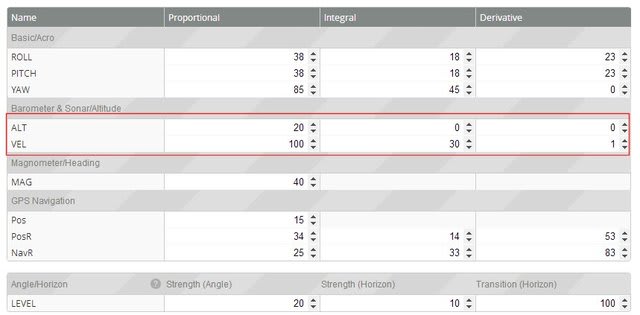
まずはBARO!なかなかの定高度で止まっているので合格!!
次にGPShold ON!!機体がピクピク反応し定点から勝手に移動~~まだまだ~~あ~~離れすぎ!!
やはり方位情報が異なっているからか~??
その後、車が駐車場に入ってきたので久しぶりH502Eをフライトしました
静か~~!!エキスパートモードで地面近く飛行させましたが
やはりスピード出ませんね~30Km位高度上げて降下しながらでも40Km位でした、上昇だけは何故かめちゃ早い(笑)
まあ用途が違うけど・・・それ以前にかっ飛ばすとモーターやられるかも・・・
で動画はまたもやバグって撮影NG 多分SDが悪いのかもで交換予定!!
で帰宅しMAG関連を見直してみると、もしやNAZE32 REV5 6DOFのMAGチップパターンに
外部コンパス使用しているので本来使用されるチップと現在使用の外部コンパスの方向が違うのかもなる疑惑!!
過去記事
ZMR250 外部コンパス使用 やはり脳内メモリー劣化(汗)年には適わない~~!!
*兼自己メモ
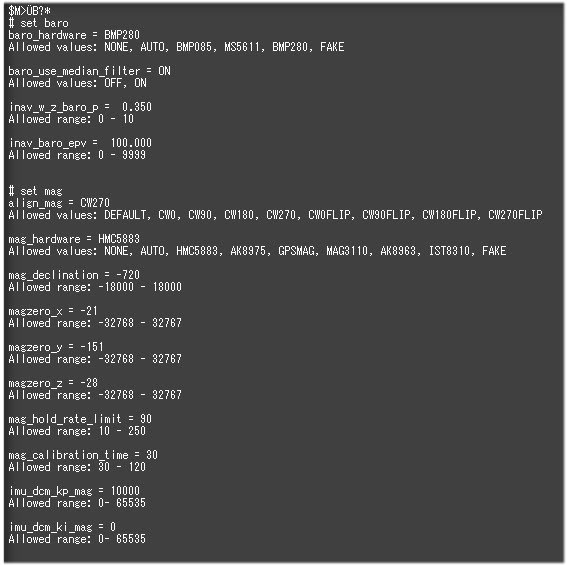
CLIでset baro で現在DEFAULT でnorthがWest 90°違う
なので方向角度変更align_mag
set align_mag = cw270 に変更しnorthピタリに校正
もしやCleanflightでも同じ状況だったのかも!?
Mode name Description
ANGLE セルフレベリングとバンク角制限付き安定モード
HORIZON セルフレベリング付きでバンク角が制限されていない安定化モード
NAV POSHOLD GPSで2D空間の位置を保持するために使用されます。
ALTHOLDと組み合わせて3次元位置ロックを取得
NAV RTH 帰宅に使用されます。 他のモードを選択する必要はありません。
NAV WP WAYPOINT ミッションを飛ばすために使用されます。 他のモードを選択する必要はありません。
PASSTHRU 手動ですべてを制御するために固定ワイヤーとともに使用されます。 (ダイレクト・サーボ制御)
Flight modes that alter behavior in combination with one of the above
Mode name Description
NAV ALTHOLD 高度を保持するために使用されます。 アングルモードと組み合わせて使用することをお勧めします。
TURN ASSIST ヘルパーにする。ヨウは、傾斜にかかわらず、地面に平行に回転する。
AIR MODE PIDコントローラをゼロスロットルでアクティブに保ちます
SURFACE 地形に従うために使用され、SONARが必要です。 正しく実装されていないため、使用しないでください。
HEADING LOCK MAGモードのように進んでいますが、磁力計は使用していません。
MAG 磁力計を使用して見出しをロックするために使用されます
HEADFREE ヘッドフリー - 有効にするとヨーはピッチ/ロール入力に影響しません
HEADADJ Heading Adjust - HEADFREEモードの新しいヨー起点を設定します
INAVのコマンドを習得中、専用コマンド多いな~~
set nav=gps*** set inavとか・・・