









超音波のジャグリング制御 ultrasonic-labo
<< 超音波のジャグリング制御 >>
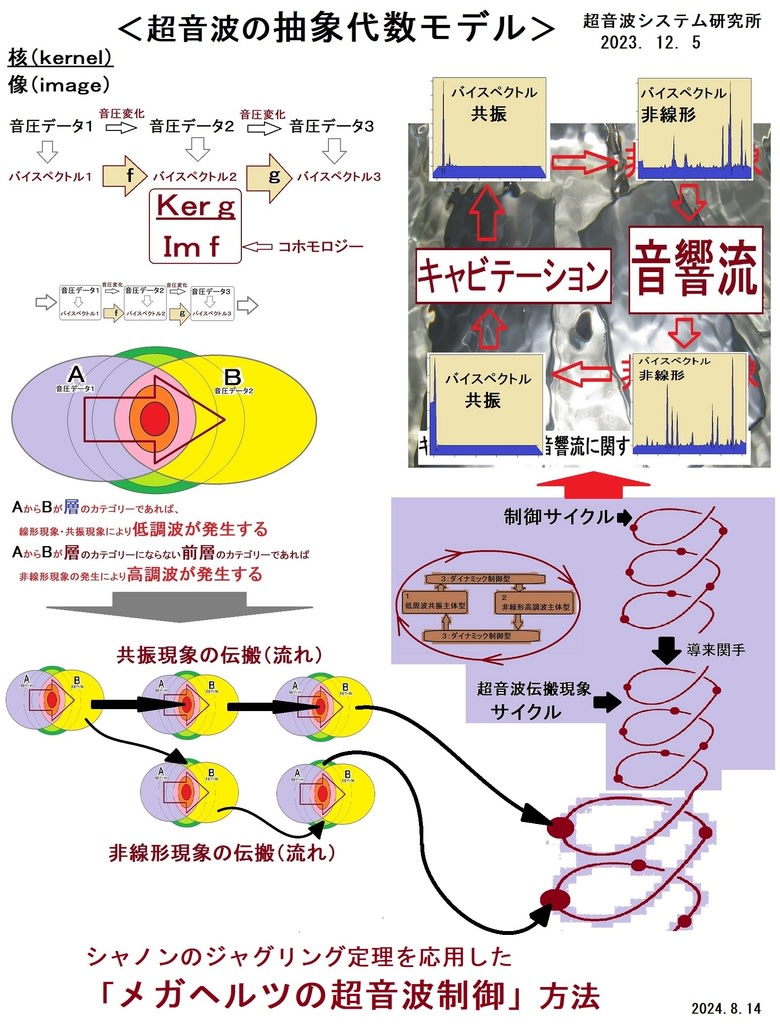
シャノンのジャグリング定理
( F + D ) * H = ( V + D ) * N
F : ボールの滞空時間(Flight time)
D : 手中にある時間(Dwelling time)
H : 手の数(Hands)
V : 手が空っぽの時間(Vacant time)
N : ボールの数(Number of balls)
応用
F : 超音波の発振・出力時間
D : 循環ポンプの運転時間
H : 基本サイクル(キャビテーション・加速度のピークの発生する)
V : 脱気装置の運転時間
N : 超音波出力の異なる周波数の数
説明
各種データの時系列変化の様子を解析して、
時間で移動するボールのジャグリング状態に相当するサイクルと
影響範囲を見つけます
この関係性からボールN個のジャグリング状態を設定して制御を行うと、
自然なシステムの状態に適した制御となり、
効率の高い超音波システムとなります
F・D・Vの関係は時間の経過とともにトレードオフの関係になります、
そのために各種の運転として他の条件を停止させた状態で
運転する方法が必要になります
これまでにも、結果としては適切と思える状態が発生することがありましたが
数時間、数日、数ヶ月後には適切でなくなり、再調整することがありました
このような経験の中から適切なモデルを検討していましたが、
ジャグリングモデルは大変良く適合するとともに、
高い効率と安定性を示しました
超音波の目的(キャビテーションの効果、加速度の効果、 等)に対して、
装置の運転時間の調整で対応(最適化)することが可能です
但し、一般的な時間を提示できないのはシステムの系として
水槽やポンプの構造による影響が大きいため、
そこに合わせる(音響特性を考慮した最適化の)必要があるためです
参考として、単純な応用例
300リットルの水槽で30リットル毎分の循環ポンプと脱気装置の場合
超音波1 ------
超音波2 ------ ------
脱気装置 --- --- ---
循環ポンプ --- --- --- ....
超音波出力:2分 100-200ワット、 脱気装置 1分、 循環ポンプ 1分
ポイント
システムを「時間で移動するボールのジャグリング状態」として
捉えることが重要です
トレードオフの関係にあるパラメータを
適切にバランス運転することを可能にします
通信の理論を考えたシャノンが
ジャグリングの理論を考えた理由もそこにあるように思います
各種の運転・停止時間の設定により
キャビテーションと加速度の効果を
調整することが可能です
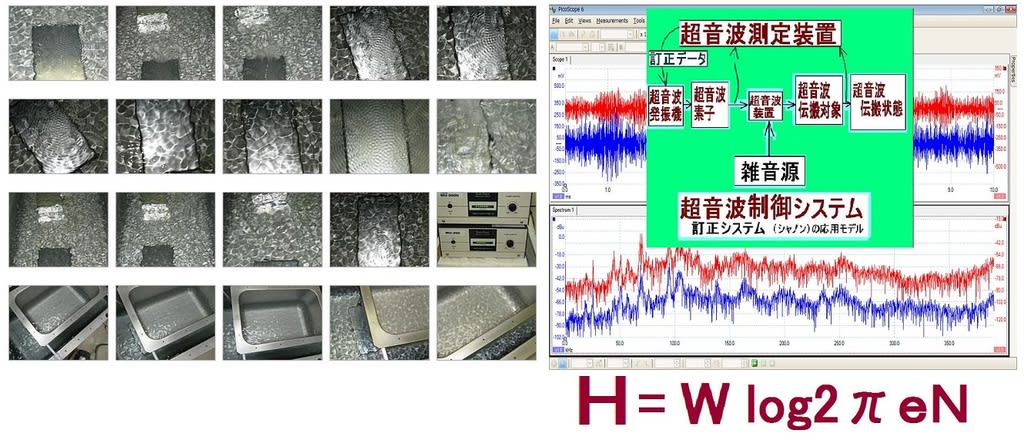
オリジナルの音圧測定解析装置:超音波テスターにより
応答特性の確認を行い、提案・実施しています
特に、複数の同じタイプの超音波振動子を
一つの水槽に入れて利用している場合
この制御を行うことで
洗浄・攪拌・改質・・・・の効果を大きく改善できます
現状の超音波装置の対策としては
最も効果的で実用的です
但し、装置の振動系の測定解析を行う必要があります
装置の振動系の問題がある場合には
測定解析に時間がかかります
超音波システム研究所
単純ですが、個別の要因(水槽、伝搬対象物、・・)により適切な設定が必要です










と
デジタルオシロスコ...")
