FLSUN Q5はボーデン式なのでダイレクト式に比較して成型の精度が悪くなります
また、引き戻し量の多く設定しないと糸引きも出やすいです
そこで、ダイレクト式に出来ないかと検討しましたが・・・
6本のアームの中にエクストルーダーとモーターを収めるにはモーターの幅を15mm程度にしないとアームと
干渉してしまいます いろいろ探してみましたが良いものが見つからなかったので、とりあえず出来そうな
エクストルーダーの位置を下げて極力ボーデンチューブを短くしてみましたところ、予想以上に効果がありました
オリジナルの状態でチューブは約550mm 位置変更後は約300mmで150mm短くできました
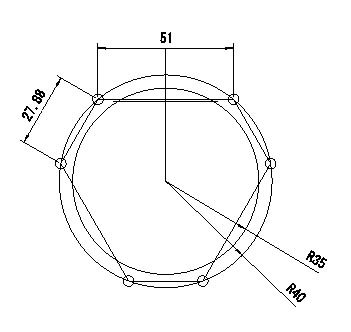
下図の様な取付板を製作 下がる位置は140mmと150mmの2種類を選択出来るようにしました

チューブの曲がり具合から140mmを選択
モーターの配線はオリジナルのままで使用して少し余裕があります

オリジナルと比較してフィラメントを入れにくくなりましたが、許容範囲

但し、フィラメントがフレームとこすれてしまうので切ったチューブをエクストルーダーの上部に差し込んで
こすれない様に設置

ホームポジションでチューブとアームが干渉してしまいますが、背の高い造形は少ないのでこのままで様子をみます
また、引き戻し量の多く設定しないと糸引きも出やすいです
そこで、ダイレクト式に出来ないかと検討しましたが・・・
6本のアームの中にエクストルーダーとモーターを収めるにはモーターの幅を15mm程度にしないとアームと
干渉してしまいます いろいろ探してみましたが良いものが見つからなかったので、とりあえず出来そうな
エクストルーダーの位置を下げて極力ボーデンチューブを短くしてみましたところ、予想以上に効果がありました
オリジナルの状態でチューブは約550mm 位置変更後は約300mmで150mm短くできました
下図の様な取付板を製作 下がる位置は140mmと150mmの2種類を選択出来るようにしました
チューブの曲がり具合から140mmを選択
モーターの配線はオリジナルのままで使用して少し余裕があります
オリジナルと比較してフィラメントを入れにくくなりましたが、許容範囲
但し、フィラメントがフレームとこすれてしまうので切ったチューブをエクストルーダーの上部に差し込んで
こすれない様に設置
ホームポジションでチューブとアームが干渉してしまいますが、背の高い造形は少ないのでこのままで様子をみます