MOMO2号機のテレメトリがOpenMOMOで公開されています.
OpenMOMO: MOMO_TF2 / telemetry_csv / UHF
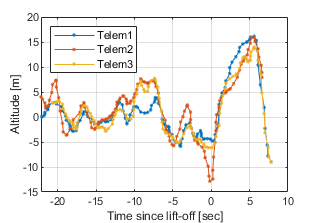
Firefly GNSS受信機の測位情報も含まれているので,プロットしてみました.
CSVファイルの測位情報はECEF座標系のため,測地系に変換し高度をプロットします.
高度の計算では,リフトオフまでの測位情報の平均値を基準点としています.
 (クリックで拡大)
(クリックで拡大)
冗長系として3台の受信機を搭載しているのでしょうか?
それぞれ異なる測位結果ですが,傾向は一致しています.
リフトオフ前,射点で静止しているときも,高度が緩やかに変動しています.
これは主に地表やランチャなどからのマルチパスの影響かと思われます.
また,Fireflyは高加速度での信号追尾のために,追尾ループの帯域を
広くしています.そのため,測位結果のノイズは大きくなる傾向があります.
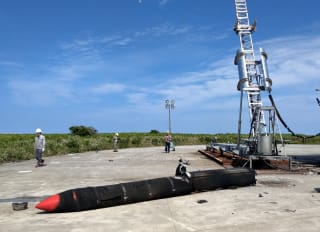
リフトオフ後,15mほど上昇してから落下している様子が捉えられています.
高度の基準は,射点で直立した状態でのフェアリング部に搭載されたFireflyの位置です.
落下後のフェアリング部は地表まで落ちるため,高度がマイナスの値を示しています.
MOMO2号機の全長が10mですので,落下後の高度が-10m程度なのは妥当な値です.
MOMO2号機のトラブルは残念でしたが,Firelyもテレメトリシステムも
墜落炎上の直前まで正常に動作していたようです.
MOMO3号機では,Fireflyが高度100kmの到達を知らせてくれることを期待しています.
【追記】ささやかながら3号機の支援.
CAMPFIRE: 続ける。宇宙への挑戦。みんなの力でMOMO3号機を飛ばそう!
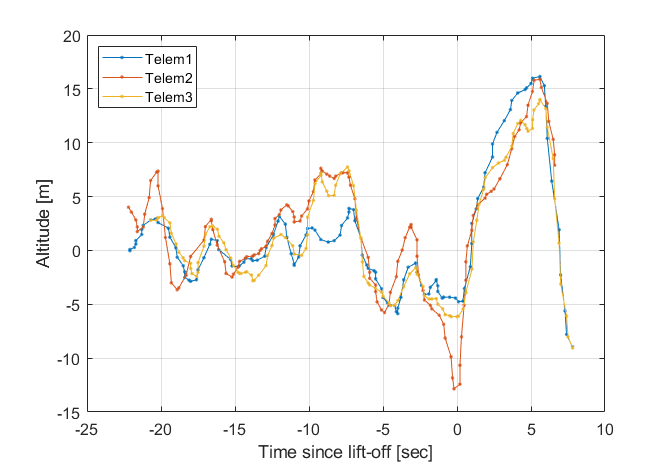
【追記2】水平方向の測位結果もプロット.落下時は北西方向に倒れ込んでいる?
 (クリックで拡大)
(クリックで拡大)
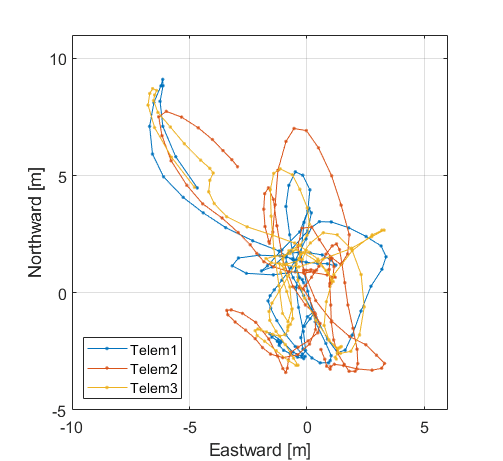
【追記3】墜落後の写真を見つけた.
スカイヒルズや工場が写っていないし,影が落ちる方向から考えると,
ランチャは東向き?そうであれば,ロケットが倒れ込んだ方向も
測位結果と一致する.
OpenMOMO: MOMO_TF2 / telemetry_csv / UHF
Firefly GNSS受信機の測位情報も含まれているので,プロットしてみました.
CSVファイルの測位情報はECEF座標系のため,測地系に変換し高度をプロットします.
高度の計算では,リフトオフまでの測位情報の平均値を基準点としています.
 (クリックで拡大)
(クリックで拡大)冗長系として3台の受信機を搭載しているのでしょうか?
それぞれ異なる測位結果ですが,傾向は一致しています.
リフトオフ前,射点で静止しているときも,高度が緩やかに変動しています.
これは主に地表やランチャなどからのマルチパスの影響かと思われます.
また,Fireflyは高加速度での信号追尾のために,追尾ループの帯域を
広くしています.そのため,測位結果のノイズは大きくなる傾向があります.
リフトオフ後,15mほど上昇してから落下している様子が捉えられています.
高度の基準は,射点で直立した状態でのフェアリング部に搭載されたFireflyの位置です.
落下後のフェアリング部は地表まで落ちるため,高度がマイナスの値を示しています.
MOMO2号機の全長が10mですので,落下後の高度が-10m程度なのは妥当な値です.
MOMO2号機のトラブルは残念でしたが,Firelyもテレメトリシステムも
墜落炎上の直前まで正常に動作していたようです.
MOMO3号機では,Fireflyが高度100kmの到達を知らせてくれることを期待しています.
【追記】ささやかながら3号機の支援.
CAMPFIRE: 続ける。宇宙への挑戦。みんなの力でMOMO3号機を飛ばそう!
【追記2】水平方向の測位結果もプロット.落下時は北西方向に倒れ込んでいる?
 (クリックで拡大)
(クリックで拡大)【追記3】墜落後の写真を見つけた.
スカイヒルズや工場が写っていないし,影が落ちる方向から考えると,
ランチャは東向き?そうであれば,ロケットが倒れ込んだ方向も
測位結果と一致する.