









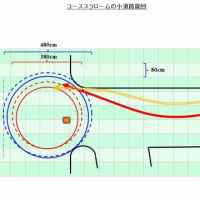
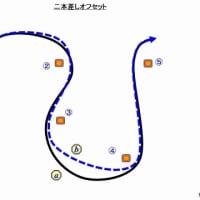
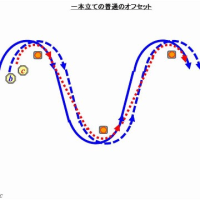
図のL1とL3を比べてみると、L1は旋回からの脱出地点=加速開始点でパイロンに一番近付いており、またL3は旋回の頂点でパイロンに最も近付いていることになります。
考えてみると、曲がり方に人それぞれの個性はあっても、(a)旋回開始点=つまり倒し始めるところ、(b)旋回の頂点、(c)旋回終了点=脱出地点=加速開始点の三つのポイントのうちの二つのポイントが決まれば、そのコーナリングのラインは一つに決まります。

図の①⑤⑦がその三つのポイントになります。
三つの内、二つが決まればということなのですが、実際には旋回開始点①は、その前のパイロンからの距離によってブレーキの掛け具合が異なるとか、さらにブレーキを残したまま倒し始めるか、ブレーキを終えてから倒し始めるかといった、その時々の操縦の考え方によって、微妙に変化します。また、「どこから倒し始めたか」ということは、実は結構曖昧で、実際にはバイクは傾き始めているんだけど気持ちの中では「そこから倒して」みたいなことが起こります。
そういう意味で、①はラインを定義するポイントとしてはあまり相応しくない。ですから⑤と⑦の位置を目標にして、パイロンを回るラインを決めるのが合理的であるわけです。
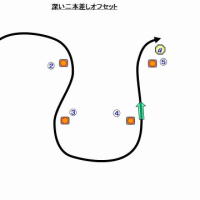
もっと現実的に考えると、少なくとも私の場合、オフセットスラロームでは大概のパイロンに対して⑤の位置を通ろうと考えます。

つまり走行ラインの⑤の位置でパイロンに最接近するようにラインを描くわけです。この場合には、⑦の位置は意識しないでも、結果としてその位置に来るということで構いません。
そして、コーススラロームで、その次のパイロンの位置を考えて、パイロンの先にスペースを作り余裕を持って次のパイロンに向かおうとする時には、ラインの⑦の位置でパイロンに最接近する、すなわち「回り終わってパイロンの裏側に付ける」ようなラインを目指すわけです。

この場合には、もちろん⑦を意識するわけですが、⑦に行くためには⑤をどの辺に置くかということを考える必要がでてきます。ここでは意識の中で実在しない⑤を、「あの辺で」という風に意識しているはずです。⑤を⑦から離れた位置に置けば、それは高速の大回りのコーナリング・ラインになりますし、近いところに置けばスピードを殺して小さく回るラインになります。そういうラインを作るためのコーナリングへのアプローチは目指すところの旋回速度と旋回半径、それに加えて進入時の速度とブレーキングの強さ、ブレーキングの強さに応じたセルフステアリングの速さと大きさによって決まります。つまり人それぞれということです。その人なりの基準で、⑤⑦の二つのポジションに向かうコーナリングのアプローチを決めればよいのです。
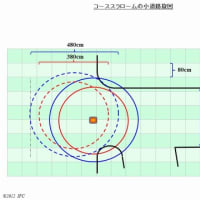
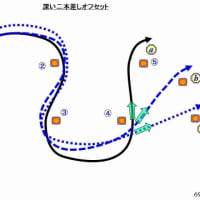
本質的に目標に対してラインを作る考え方は、上図の二種類に集約されます。ということは仮想パイロン⑤と⑦を、実在するパイロンに対して、どのように位置させるかということが問題になるわけです。
実在のパイロンを⑦に置くならば、仮想パイロンは⑤に置いて、仮想パイロン⑤から実在パイロン⑦に向かうラインを想定するし、実在のパイロンを⑤に置くならば、仮想パイロンを⑦に置くということです。
もしも実在のパイロンとは無関係に自分が走りたいラインを設定したいのであれば、仮想パイロンは⑤と⑦の二本を置きます。そして、実在のパイロンとは関係なく、仮想パイロンを目指して走ればよいのです。それによって、実在のパイロンに対するラインの設定が自由自在に行えるようになります。
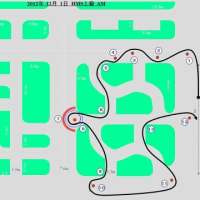
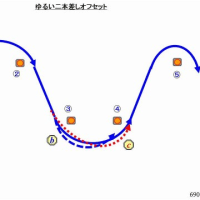
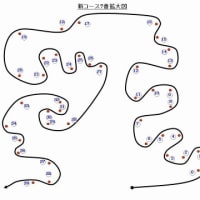
それでは、バリアブルコースを例にとって、⑤と⑦のパイロンをどういう風に置くか考えてみましょう。

以前にバリアブルのS字は、むしろ直線のクランクと考えるという説明をしました。それも含めて、実在のパイロンとは関係なく、自分が走りたいラインに対して仮想パイロンを置いてみました。

これは、あくまでも私が自分のライディングスタイルで、また自分の技量において考えている目標値であるわけです。皆さんは自分が旋回できる回転半径やブレーキングの技術、その他諸々の要件を考慮したうえで、自分はどこを回りたいかということを考える必要があります。
ただ、その時に、実在のパイロンとは別に、自分が目指すべきラインを意識してそこを回るようにすると、もっとうまく旋回できる可能性があります。そのための仮想パイロンという考え方なのです。
考えてみると、曲がり方に人それぞれの個性はあっても、(a)旋回開始点=つまり倒し始めるところ、(b)旋回の頂点、(c)旋回終了点=脱出地点=加速開始点の三つのポイントのうちの二つのポイントが決まれば、そのコーナリングのラインは一つに決まります。
図の①⑤⑦がその三つのポイントになります。
三つの内、二つが決まればということなのですが、実際には旋回開始点①は、その前のパイロンからの距離によってブレーキの掛け具合が異なるとか、さらにブレーキを残したまま倒し始めるか、ブレーキを終えてから倒し始めるかといった、その時々の操縦の考え方によって、微妙に変化します。また、「どこから倒し始めたか」ということは、実は結構曖昧で、実際にはバイクは傾き始めているんだけど気持ちの中では「そこから倒して」みたいなことが起こります。
そういう意味で、①はラインを定義するポイントとしてはあまり相応しくない。ですから⑤と⑦の位置を目標にして、パイロンを回るラインを決めるのが合理的であるわけです。
もっと現実的に考えると、少なくとも私の場合、オフセットスラロームでは大概のパイロンに対して⑤の位置を通ろうと考えます。
つまり走行ラインの⑤の位置でパイロンに最接近するようにラインを描くわけです。この場合には、⑦の位置は意識しないでも、結果としてその位置に来るということで構いません。
そして、コーススラロームで、その次のパイロンの位置を考えて、パイロンの先にスペースを作り余裕を持って次のパイロンに向かおうとする時には、ラインの⑦の位置でパイロンに最接近する、すなわち「回り終わってパイロンの裏側に付ける」ようなラインを目指すわけです。
この場合には、もちろん⑦を意識するわけですが、⑦に行くためには⑤をどの辺に置くかということを考える必要がでてきます。ここでは意識の中で実在しない⑤を、「あの辺で」という風に意識しているはずです。⑤を⑦から離れた位置に置けば、それは高速の大回りのコーナリング・ラインになりますし、近いところに置けばスピードを殺して小さく回るラインになります。そういうラインを作るためのコーナリングへのアプローチは目指すところの旋回速度と旋回半径、それに加えて進入時の速度とブレーキングの強さ、ブレーキングの強さに応じたセルフステアリングの速さと大きさによって決まります。つまり人それぞれということです。その人なりの基準で、⑤⑦の二つのポジションに向かうコーナリングのアプローチを決めればよいのです。
本質的に目標に対してラインを作る考え方は、上図の二種類に集約されます。ということは仮想パイロン⑤と⑦を、実在するパイロンに対して、どのように位置させるかということが問題になるわけです。
実在のパイロンを⑦に置くならば、仮想パイロンは⑤に置いて、仮想パイロン⑤から実在パイロン⑦に向かうラインを想定するし、実在のパイロンを⑤に置くならば、仮想パイロンを⑦に置くということです。
もしも実在のパイロンとは無関係に自分が走りたいラインを設定したいのであれば、仮想パイロンは⑤と⑦の二本を置きます。そして、実在のパイロンとは関係なく、仮想パイロンを目指して走ればよいのです。それによって、実在のパイロンに対するラインの設定が自由自在に行えるようになります。
それでは、バリアブルコースを例にとって、⑤と⑦のパイロンをどういう風に置くか考えてみましょう。
以前にバリアブルのS字は、むしろ直線のクランクと考えるという説明をしました。それも含めて、実在のパイロンとは関係なく、自分が走りたいラインに対して仮想パイロンを置いてみました。
これは、あくまでも私が自分のライディングスタイルで、また自分の技量において考えている目標値であるわけです。皆さんは自分が旋回できる回転半径やブレーキングの技術、その他諸々の要件を考慮したうえで、自分はどこを回りたいかということを考える必要があります。
ただ、その時に、実在のパイロンとは別に、自分が目指すべきラインを意識してそこを回るようにすると、もっとうまく旋回できる可能性があります。そのための仮想パイロンという考え方なのです。
※コメント投稿者のブログIDはブログ作成者のみに通知されます