









巻く損の煙突がなくなった分、とても重心が低く見えます。
先読みセンサを仮に置くと、
自分たちでは先読みセンサブラケットの形状が決まりませんでした。
何しても格好悪いんじゃないかというくらいです。
例えるなら、先読みセンサが提灯のようになり、
mcrが提灯を持って走っているように見えます。
デザイナーに助言を頂こうという話になりました!

先読みセンサを仮に置くと、
先読みセンサがとても格好悪いです!
自分たちでは先読みセンサブラケットの形状が決まりませんでした。
何しても格好悪いんじゃないかというくらいです。
例えるなら、先読みセンサが提灯のようになり、
mcrが提灯を持って走っているように見えます。
デザイナーに助言を頂こうという話になりました!







一応知り取り付け方は決まりましたが、アームの形状に苦慮しています。
ジュラルミンの1mm板を削り出すことになりそうです。
月曜日から組み立てに入ります。
モーターの取り付け方法変更したら、満足できる物ができました。
また、フロントの剛性アップ図りました。
センサーアームの取り付け部も削りだしです。
スイッチを入れると今までと違いPWMの周期でセンサー先端まで振動が伝わっているのがわかります。
重量は電池込みで1024g。軽量化はまだ未対策なので、走行させてみてMCで肉抜きをする予定です。
ネジが極端に少ないので、何とか1kgは切れそうです。
ギア比、モーターの個数の違うマシンを少なくとも10台作らないと、いけないので大変です。欲張り過ぎたみたいです。
後は走らせてみてどのタイプを使うか決める予定です。
モーターユニットの交換だけで構成の違うマシンになります。モーターも交換可能になりました。
スペアマシンがあれば安心です。
回路と部品は今回はすべて同じなので、交換は容易です。
今月中にはすべてのプロトタイプが完成する予定だったのに、例年通り遅れ始めています。
頑張らないと!
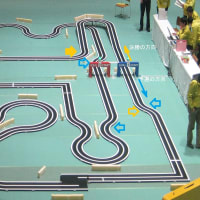
先読みセンサーでのレーンチェンジ速いのですが、センサーを伸ばして対処しようという流れになっています。
明日から修学旅行です。こちらの活動はゆっくりになります。