








BeagleBone Blackの在庫がまったく復活する兆しがないので,
とりあえず手元にあるBeagleBoneでRTKLIBを動かしてみました.
まずは,Adafruitのチュートリアルにしたがって,USBシリアル経由でログイン.
さらにEthernetの確認をします.
Adafruit learning system: BeagleBone Tutorials for the TI embedded Linux board

BeagleBoneは,ルータを介してLANに接続.ifconfigでチェックすると
eth0のIPアドレスに192.168.1.25がアサインされていました.
Tera Termを使って,Ethernet経由でもログインできます.
 (クリックで拡大)
(クリックで拡大)
USBシリアルと同様に,user nameはroot,パスワードは空欄です.
 (クリックで拡大)
(クリックで拡大)
マイコン工作入門の記事ではubuntuをインストールしていますが,
ここではこのままデフォルトのAngstromでRTKLIBを動かしてみます.
まずは,RTKLIB 2.4.2のソースコードをダウンロードします.
root@beaglebone:~# wget http://www.rtklib.com/prog/rtklib_2.4.2.zip
unzipもgccもAngstromのディストリビューションに含まれているため,
追加でインストールするツールは特にありません.
そのままソースコードを展開してコンパイルできます.
root@beaglebone:~# unzip rtklib_2.4.2.zip
root@beaglebone:~# cd rtklib_2.4.2/app
root@beaglebone:~# chmod 755 makeall.sh
root@beaglebone:~# ./makeall.sh
コンパイルは30分ほどで問題なく終了.
これで,BeagleBoneで動作するrtkrcvが出来ました.
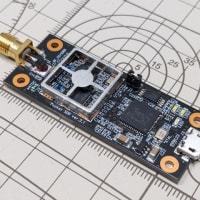
次に,このために準備したLEA-4Tのbreakout boardをBeagleBoneのUSBホストに接続します.
LEA-4Tは,UBXフォーマットでRAWデータのRXM-RAWと,航法メッセージのRXM-SFRBが
出力されるように,u-centerで事前に設定しておきます.

マイコン工作入門の記事では,一旦BeagleBoneの電源を落としてから
受信機を接続し,電源を入れなおさないと認識してくれないようですが,
AngstromではBeagleBoneの電源が入っている状態で接続しても問題なく
ttyACM0として繋がります.また,シリアルポートもすべて認識されているようです.
 (クリックで拡大)
(クリックで拡大)
LEA-4Tが繋がりましたので,rtkrcvの入力としてUBXフォーマットを設定します.
rtkrcv.confの設定はマイコン工作入門の記事とまったく同じです.
ファイルの編集にはviエディタを使いました.
あまりにも懐かしくて,ほとんど操作を覚えていません.
viエディタの基本的な使い方を参考にrtkrcv.confを編集します.
rtkrcvから実行されるrtkstart.shとrtkshut.shの属性も実行可能にしておきます.
root@beaglebone:~# chmod 755 rtkstart.sh
root@beaglebone:~# chmod 755 rtkshut.sh
これで準備が整いましたので,rtkrcvを実行します.
root@beaglebone:~# ./rtkrcv
rtkrcvのrtk serverは,startコマンドで開始,shutdownで終了します.
rtkrcvで計算された測位結果はtcpsvrに出力され,Ethernet経由でWindows上の
rtkplotでモニタできます.
まず,rtkplotのFileから,Connection Settingsを開きます.
 (クリックで拡大)
(クリックで拡大)
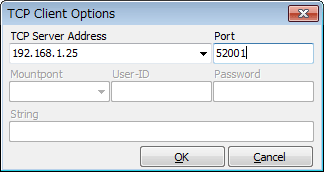
ここで,Stream TypeにTCP Clientを,Solution FormatにLLHを選びます.

さらに,OptボタンクリックしてTCP Client Optionsを開き,
TCP Server AddressとPortを適切に設定します.
接続の設定後,FileからConnectで接続すると,測位結果の描画か開始されます.


オフィスの窓からアンテナを出しているため,測位精度は相変わらずですが,
無事にBeagleBoneでRTKLIBを動かすことができました.
ネットワークにも繋がっているので,次はMGEXのリアルタイム配信を基準局にして
RTKを試してみよう.
MGEXネットワークの一覧を見てみると,一番近いのはCHOFかな.
それでも数十kmは離れているので,1周波のRTKは厳しそう.
さらに条件は厳しいけれど,IGSのReal-Time Serviceに接続してPPPも試してみたい.
【追記】WiFiで無線LAN接続してみたいけれど,どうやら一筋縄ではいかないらしい.
USBアダプタにも当たりハズレがあるようだ.BuffaloのWLI-UC-GNMで成功が報告されているので,
amazonで注文.800円だから,ハズレてもまあいいや.
amazon.co.jp: BUFFALO 無線LAN子機 コンパクトモデル 11n技術・11g/b対応 WLI-UC-GNM
OSもAngstromよりもubuntuの方が相性が良いらしい.RTKLIBが動いているSDカードはこのまま
残しておきたいので,ubuntu用に4GBのmicroSDカードも注文します.
amazon.co.jp: Transcend microSDHCカード 4GB Class10 (無期限保証) TS4GUSDHC10
とりあえず手元にあるBeagleBoneでRTKLIBを動かしてみました.
まずは,Adafruitのチュートリアルにしたがって,USBシリアル経由でログイン.
さらにEthernetの確認をします.
Adafruit learning system: BeagleBone Tutorials for the TI embedded Linux board
BeagleBoneは,ルータを介してLANに接続.ifconfigでチェックすると
eth0のIPアドレスに192.168.1.25がアサインされていました.
Tera Termを使って,Ethernet経由でもログインできます.
 (クリックで拡大)
(クリックで拡大)USBシリアルと同様に,user nameはroot,パスワードは空欄です.
 (クリックで拡大)
(クリックで拡大)マイコン工作入門の記事ではubuntuをインストールしていますが,
ここではこのままデフォルトのAngstromでRTKLIBを動かしてみます.
まずは,RTKLIB 2.4.2のソースコードをダウンロードします.
root@beaglebone:~# wget http://www.rtklib.com/prog/rtklib_2.4.2.zip
unzipもgccもAngstromのディストリビューションに含まれているため,
追加でインストールするツールは特にありません.
そのままソースコードを展開してコンパイルできます.
root@beaglebone:~# unzip rtklib_2.4.2.zip
root@beaglebone:~# cd rtklib_2.4.2/app
root@beaglebone:~# chmod 755 makeall.sh
root@beaglebone:~# ./makeall.sh
コンパイルは30分ほどで問題なく終了.
これで,BeagleBoneで動作するrtkrcvが出来ました.
次に,このために準備したLEA-4Tのbreakout boardをBeagleBoneのUSBホストに接続します.
LEA-4Tは,UBXフォーマットでRAWデータのRXM-RAWと,航法メッセージのRXM-SFRBが
出力されるように,u-centerで事前に設定しておきます.
マイコン工作入門の記事では,一旦BeagleBoneの電源を落としてから
受信機を接続し,電源を入れなおさないと認識してくれないようですが,
AngstromではBeagleBoneの電源が入っている状態で接続しても問題なく
ttyACM0として繋がります.また,シリアルポートもすべて認識されているようです.
 (クリックで拡大)
(クリックで拡大)LEA-4Tが繋がりましたので,rtkrcvの入力としてUBXフォーマットを設定します.
rtkrcv.confの設定はマイコン工作入門の記事とまったく同じです.
ファイルの編集にはviエディタを使いました.
あまりにも懐かしくて,ほとんど操作を覚えていません.
viエディタの基本的な使い方を参考にrtkrcv.confを編集します.
rtkrcvから実行されるrtkstart.shとrtkshut.shの属性も実行可能にしておきます.
root@beaglebone:~# chmod 755 rtkstart.sh
root@beaglebone:~# chmod 755 rtkshut.sh
これで準備が整いましたので,rtkrcvを実行します.
root@beaglebone:~# ./rtkrcv
rtkrcvのrtk serverは,startコマンドで開始,shutdownで終了します.
rtkrcvで計算された測位結果はtcpsvrに出力され,Ethernet経由でWindows上の
rtkplotでモニタできます.
まず,rtkplotのFileから,Connection Settingsを開きます.
 (クリックで拡大)
(クリックで拡大)ここで,Stream TypeにTCP Clientを,Solution FormatにLLHを選びます.
さらに,OptボタンクリックしてTCP Client Optionsを開き,
TCP Server AddressとPortを適切に設定します.
接続の設定後,FileからConnectで接続すると,測位結果の描画か開始されます.
オフィスの窓からアンテナを出しているため,測位精度は相変わらずですが,
無事にBeagleBoneでRTKLIBを動かすことができました.
ネットワークにも繋がっているので,次はMGEXのリアルタイム配信を基準局にして
RTKを試してみよう.
MGEXネットワークの一覧を見てみると,一番近いのはCHOFかな.
それでも数十kmは離れているので,1周波のRTKは厳しそう.
さらに条件は厳しいけれど,IGSのReal-Time Serviceに接続してPPPも試してみたい.
【追記】WiFiで無線LAN接続してみたいけれど,どうやら一筋縄ではいかないらしい.
USBアダプタにも当たりハズレがあるようだ.BuffaloのWLI-UC-GNMで成功が報告されているので,
amazonで注文.800円だから,ハズレてもまあいいや.
amazon.co.jp: BUFFALO 無線LAN子機 コンパクトモデル 11n技術・11g/b対応 WLI-UC-GNM
OSもAngstromよりもubuntuの方が相性が良いらしい.RTKLIBが動いているSDカードはこのまま
残しておきたいので,ubuntu用に4GBのmicroSDカードも注文します.
amazon.co.jp: Transcend microSDHCカード 4GB Class10 (無期限保証) TS4GUSDHC10












※コメント投稿者のブログIDはブログ作成者のみに通知されます