今度は、マイコンボードにGR-SAKURAを使い、音声合成と連動させてみた。
音声合成には、秋月で買った「音声合成LSI ATP3011R4-PU(ロボ声)」を使用した。
スイッチサイエンスの”ABCプレート”にGR-SAKURAを載せてみた。ネジ位置ぴったり。


このArduino用音声合成LSIライブラリ、GR-SAKURAでも動くかな...
・[Arduino] AquesTalk ライブラリ | N.Yamazaki's blog
色々手を加えて無理やりGR-SAKURAのコンパイラでコンパイル通した。
修正は主にGR-SAKURAに無い"String"や"prog_char"に関する部分をコメントアウトしただけ。
ということで、Arduino用音声合成LSIライブラリはなんとかGR-SAKURAで動いた。
今度はアニマトロ二クスと連動させてみる。

(1)で作ったArduino+ProcessingのプログラムもGR-SAKURAに移植して、音声合成と口の動きを連動するようにした。
GR-SAKURAのSerialは勝手に改行コードを変換してしまうので、Arduinoのプログラムを移植するときにハマって、しばらく悩んだ後に思い出す。orz
(GR-SAKURAのライブラリV1.07では直っているようだ。)
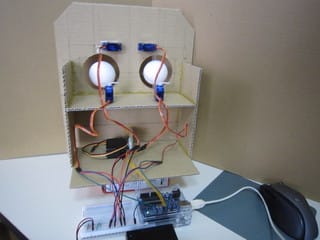
裏側はこんな感じ。

音声と口の動きの連動は、音声合成LSIへ出力する文字列から母音を抜出し、それに応じて口の開き方を変えるだけの簡単な方法。
何となくそれっぽく見える...かな。
動画はこちら。
サーボの音が大きすぎて音声合成の声がわかりずらい。orz
これはアンプを手抜きしてトランジスタ1個でやっているせい。(^^;)
・音声合成LSI「AquesTalk pico LSI」と口の動きを連動させる実験。
GR-SAKURA + Processingで音声合成LSIとRCサーボを動かしている。
アニマトロニクス(Animatronics)の実験(3)
顔の表情も変えるようにしてみた。
アニマトロニクス(Animatronics)の実験(4)
今度は首のサーボを追加しようかな..
関連する記事
・ アニマトロニクス(Animatronics)の実験(1)