17:25 from Tweet Button [ 5 RT ]
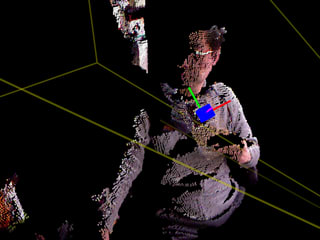
KinectでColorTrackingの実験(その2):KinectのDepth情報を使って、3次元空間でColorTrackingしてみた。 youtu.be/FGaodIP3ILE #kinect #openni #processing
by robo8080 on Twitter
KinectでColorTrackingの実験(その2):KinectのDepth情報を使って、3次元空間でColorTrackingしてみた。 youtu.be/FGaodIP3ILE #kinect #openni #processing
by robo8080 on Twitter