








OpenNI+ARToolKit応用の動画をまとめてみた。
応用例1
3次元表示してみた。
応用例2
骨格トラッキングで、タチコマと戯れてみた。
応用例3
ARTK_MMD+OpenNI+Kinectの実験
― 以上 -
OpenNI+ARToolKit応用の動画をまとめてみた。
応用例1
3次元表示してみた。
応用例2
骨格トラッキングで、タチコマと戯れてみた。
応用例3
ARTK_MMD+OpenNI+Kinectの実験
― 以上 -
ProcessingでKinectを使ってみた。
動作環境は以下の通り。
OS : Windows7 64bit
OpenNI : openni-win32-1.5.2.23-dev.msi
NITE : nite-win32-1.5.2.21-dev.msi
SensorKinect : avin2-SensorKinect-faf4994.zip
simple-openni : SimpleOpenNI-0.24-win32.zip
NyARToolkit for processing : nyar4psg-1.1.7.zip
ファイルの入手先はこちら
http://www.openni.org/Downloads/OpenNIModules.aspx
https://github.com/avin2/SensorKinect
http://code.google.com/p/simple-openni/
http://sourceforge.jp/projects/nyartoolkit/releases/?package_id=8920
・simple-openniでProcessingからKinectを使ってみた。
とりあえずサンプルはサクッと動いた。

・Kinect ZOOMを使ってみた。
さてこいつの威力を試させてもらおう。

左がZOOM有り。右がZOOM無し。
ZOOMを使うとカメラに映るエリアが広がっているが、穴からのぞいたように周りが黒くなってしまうのが残念。

・NyARToolkit for processingを使ってみた。
エラーが出るが一応動いた。
”import processing.core.*”している行をコメントにしたらエラーは出なくなった。

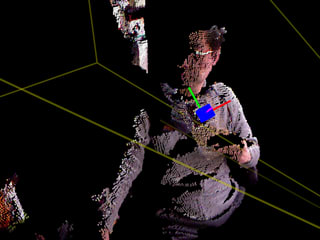
・NyARToolkit+simple-openniの実験(1)
つぎは、NyARToolkit for processing + simple-openniでKinectカメラ画像にAR表示させてみる。
10分もかからずにサクッと出来た。簡単すぎ!!VC++でやった時のあの苦労はなんだったのか!orz
KinectのRGBカメラ画像でマーカーを検出して、Depthカメラ画像にAR表示させてみた。
画像の周りが丸く黒いのはZOOMを使っているから。

・NyARToolkit+simple-openniの実験(2)
applyMatrix(nya.getMarkerMatrix(0))しただけではダメか。
NyARToolkitとOpenNIでは座標の取り方が違うんだろうな。

・NyARToolkit+simple-openniの実験(3)
X軸周りに180度回転&X軸の向きを逆にしてapplyMatrix(nya.getMarkerMatrix(0))したらうまくいった。
キャリブレーションしてないから位置はずれてる。
”NyAR4PsgConfig.CONFIG_DEFAULT”にすればX軸の反転は不要だった。

・NyARToolkit+simple-openniの実験(4)
@nyatla さんに新しいAPI、marker2ScreenCoordSystem関数を追加していただいた。
NyARToolkit for processing1.1.7

追加していただいたAPIを使って、位置の補正もうまくいった。ほぼARマーカーの位置に重なっている。
マーカー中心位置ー>スクリーン座標ー>Depthカメラ座標、に変換して補正している。
動画はこちら。
Kinect でAR の実験
・ちょっと寄り道
双葉電子のサーボモータRS304MDとアルミフレーム。次はこれで...

よし出来た。双葉電子のサーボモータRS304MD+小型Wi-FiカメラCS-W07G-CY。

双葉電子のサーボモータRS304MD+小型Wi-FiカメラCS-W07G-CYで、ARマーカーのトラッキング出来た。
Kinectとは関係ないが...。
NyARToolkit for processingの”marker2ScreenCoordSystem”関数使用。

動画はこちら。
ARマーカーのトラッキング実験
・KinectでColor Trackingの実験。
KinectのDepth情報で背景を分離してからColor Trackingしてみた。

動画はこちら。
kinectでColor Trackingの実験(その1)
KinectでColorTrackingの実験(その2)
KinectのDepth情報を使って、3次元空間でColorTrackingしてみた。
・3D表示をポリゴン+テクスチャーマッピングに改造してみた。
SimpleOpenNIのサンプルプログラム"AlternativeViewpoint3d"の表示を、ポリゴン+テクスチャーマッピングに改造してみた。
表示は重くなるが拡大してみるとその差歴然。

つづく...?
Kinect + OpenNIの実験。KinectのDepthをmqoファイルフォーマットで出力して、Metasequoiaに読み込ませるプログラムを作ってみました。
"DepthCapture"の画面はこんな感じ。

出力したファイルを読み込んだMetasequoiaの画面はこんな感じ。 動画はこちら。

まだ開発途中なので不具合があるかもしれませんが、それでもかまわないという方はバイナリを置いておきます。動かなかったらごめんなさい。
現在わかっている不具合:mqoファイル名に日本語は使えません。 Ver. 0.02で対策しました。
こちらで動作確認したOSは、Windows7 64bit版のみです。
また、OpenNIがインストール済みで、OpenNIのサンプルプログラムが動いていることが必要です。
使い方は添付"readme.txt"を参照してください。
現在開発途中のため、ソースは汚くて公開できる状態ではないので整理してからいずれ...
-----------------------------------------------
@kirurobo(SaM)さんの"OpenNI で取得した深度をポリゴンメッシュで表示"を参考にさせていただきました。
ありがとうございます。
―以上―


