









加工失敗でした。大実時代と同じ部品の製作です。
左の部品は加工を間違えて曲がり、
右の部品は穴位置を2mm間違えました。
明日からはテスト休みです。
 「産学連携プログラミング教室」に参加
7年前
「産学連携プログラミング教室」に参加
7年前
 「産学連携プログラミング教室」に参加
7年前
「産学連携プログラミング教室」に参加
7年前
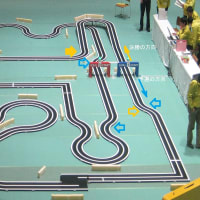 JMCR2017全国大会 初日(試走会)終了
8年前
JMCR2017全国大会 初日(試走会)終了
8年前
 全国高等学校ロボット競技大会への切符をいただきました。
8年前
全国高等学校ロボット競技大会への切符をいただきました。
8年前
 全国ソーラーラジコンカーコンテスト 審査員特別賞受賞
8年前
全国ソーラーラジコンカーコンテスト 審査員特別賞受賞
8年前
 もうすぐ「加賀ロボレーブin実高展」
9年前
もうすぐ「加賀ロボレーブin実高展」
9年前
 日立DSより新発売
9年前
日立DSより新発売
9年前
 RoboRAVE INTERNATIONAL 参戦
10年前
RoboRAVE INTERNATIONAL 参戦
10年前
 丸棒からモータブラケット製作
10年前
丸棒からモータブラケット製作
10年前
 旋盤と検査の問題
10年前
旋盤と検査の問題
10年前
いつもブログを楽しんでみています。
マイコンカーをやっているのですが、角パイプ?をどうやって加工したら、その写真のように綺麗な加工ができますか?
現在僕の高校ではCNCやボール盤くらいしか環境がありません。
CNCとボール盤の環境ではできませんが方法を紹介します。
①バイスを傾きなく取り付ける
(ダイヤルゲージの土台を固定した部分に取り付け、ダイヤルゲージの先をバイスの奥の板にセットして、大きくX方向に動かしながらズレ量を測定します。)
このとき、100mmで0.02mmくらいのズレ量に抑えます。
余裕があれば上下方向に傾いていないかもチェックします。
②材料を取り付けます。
③材料の左端を大きなエンドミルで切ります
④エンドミルを回転させながら、材料の左端を接触させ、X方向の原点設定します。
⑤材料の奥側を同様にエンドミルを接触させ、Y方向の原点設定をします。
⑥座標を見て正面側を加工する
⑦裏面が上になるように掴み変えます
⑧Y方向の原点設定は不要ですが、掴み変えによってX方向の原点がずれているので、エンドミルで同様にX軸原点を再設定します。
⑨座標を見て加工します。
⑩加工し切れなかった部分は金鋸でカットします。
こんな感じです。
ハイトゲージで罫書き
http://www.askul.co.jp/p/7416612/?rtMode=search&SAStruts.method=run&sc_e=cp_p_dt_go_pl_c_p_p1-3
のような高級なポンチで位置決めをすれば十分です。
穴は
M2.6のところはφ3で、
M3のところはφ3.4で、
φ6.2のところはφ7で
加工してください。
軸以外の位置はずれていても構いません。
φ4の軸を入れる穴は気をつけてください。
ボール盤に固定する際、バイスを使うときはバイスの裏側のごみなど、すべて取り除き、傾きのないようにしてください。もしくは直接ボール盤の床面にクランプで固定すると良いと思います。
左右の軸の高さが変わると問題です。
これはステンレス製のシム等を利用するか、紙をモータブラケットとフレームの間にはさみ、左右の軸の高さが一緒になるようにしてください。
軸高さの測定は
デジタルノギスでモータブラケット底面~φ4の穴の外側の距離を測ると良いと思います。
組み立て後の実測値を知りたければ、フレームにモータブラケットを取り付け、軸も取り付け、組み立てて、定番の上にフレームを置き、ダイヤルゲージで軸の振れを測定してください。
それと、軸がガタつくようであれば、φ4の穴をドリルで開けるのをやめてください。ドリルは左右の切れ刃の鋭利さの違い等で振れて穴径がばらつきます。
φ4H7の精度で加工できる工具がありますので、そちらを使用してください。
高校生だけで製作せず、経験のある大人(先生でなくても良い)に相談をすることをお勧めします。
いろんな大人がいろんなことをアドバイスしてくると思います。そのどれを採用するかはあなた次第です。
その判断力と行動力を養うことが有効かと思われます。
ちなみに例年。出場する台数の3台分くらいのマイコンカーを製作しています(結果的に改良していくと、作った部品がボツになるのでそうなります)