








11月2日に金沢市の近江町いちば館でアメフトロボット大会が行われます。
昨日はその監督者打ち合わせ会議に出席。
11月2日は司会&解説として出席します。
11月2日に金沢市の近江町いちば館でアメフトロボット大会が行われます。
昨日はその監督者打ち合わせ会議に出席。
11月2日は司会&解説として出席します。
11月2日に金沢市の近江町いちば館でアメフトロボット大会が行われます。
昨日はその監督者打ち合わせ会議に出席。
11月2日は司会&解説として出席します。
今日、検定料を収めてきました。
機械検査作業3級 33名
普通旋盤作業3級 13名(うち、2名は若手の先生の力試し)
60万円弱の検定料。責任重大である。
実技の試験日は12月21日の予定。
検査、旋盤ともに1年生がいる。
検査はどうにかなるが、旋盤は今から段取りを始めることとなった。
また忙しくなるが、生徒は爆発的な実力upが期待される。
あー忙し。

ロボット大会楽しかったです。
大会では特別賞をもらいました。
今回の成果は、生徒が技術交流してくれたことかな。
興味を持ってくれてよかったです。
金沢工業大学の先生、学生、OBの皆様、ありがとうございました。
生徒は屋台のチョリスをオマケしてもらったみたいで、喜んでました。
技術交流の機会は大切ですね。
「生徒より書類」の状態が続いているため、昨日、新たな挑戦が行われました。
「旋盤大会に生徒は一度も通しで練習せずに参加する」
(ただし、要素練習はしています)
結果は2人中1人がたぶん4位/9人中、もう1人が標準時間+10分で完成。
共にポカミスなし。
条件は以下の通り、
使える旋盤は1台、生徒は2人!
課題研究で使えた時間は6時間、放課後は2時間(前日)のみ!
生徒は相模原と名古屋の企業にそれぞれ内定(3年生)、
夏に2級を受け、10月に受かった子。
ひたすら図面と作りかけの現物見ながらのシミュレーション。
しかも英語を使って!?
(英語を使った授業を試行中のため→かなり嫌がっていた)
(ほとんど、"This one is that." と言ってたような気がします)
生徒はエンジニアとしてコミュニケーションができるようになり、
共通のイメージが持てて、実行できるようになったと思われます。
例のロボット強化のプロジェクトの件です。
これまでの動きは
・7月上旬に「大学ロボット世界一の大学へ見学」
・7月中旬に「自動車用マイコン世界一の企業による制御の講習会&普及活動」
・8月下旬にロボット大会視察
・9月、10月に3回の県内大会を開催(つかれた)。
そして12月にとある強豪校による研修が内々定しています。
仲介くださったN先生、ありがとうございました。
これから頑張って書類を作ります。
何度も作り直した結果、こんな形に落ち着きました。
CADLUS を使った授業ができるレベルになりました。
これでようやく生徒に教えられる!
残念ながらこれもMCR関連ではありません。

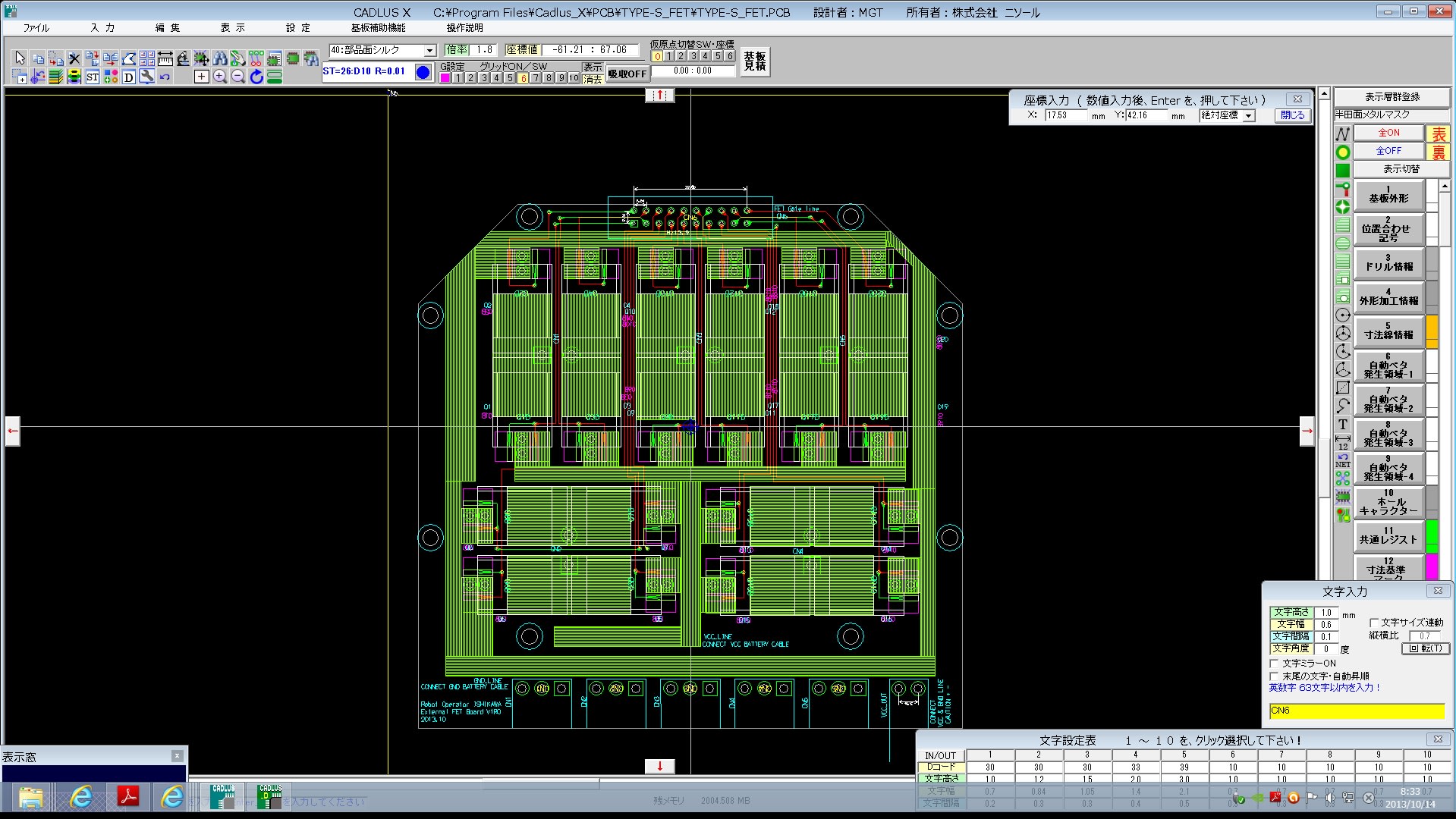
Robot Operator ISHIKAWA基板に係る
FETのゲートから1.27ピッチのピンヘッダで信号を取り出し、
20ピンのフラットケーブルに接続するための中間基板です。
type-S基板の真下に重ねるタイプの基板を制作中。
電流が流れすぎて表面がめくれるため、半田モリモリ基板になりそう。
高さを抑えるために表面実装とし、表裏で並列のタイプとしました。

もしかするとマイコンカーの北信越大会すら行けないかもしれません。
今年の北信越枠はどうなるのでしょうか???
以下は私の予想
・駒ケ根 2
・糸魚川白嶺 1
・富山工業 2
・砺波工業 2
・大聖寺実業 1
・輪島 1
・金沢北陵 1
・敦賀工業 1
大聖寺実業は、県工と同様、十万石監督が事務屋同然になってしまっていて、
私の代わり?の棒鋼監督がロボット大会の全国大会で指導が手薄になっています。
輪島と金沢北陵が伸びてきそうですね。
本日は21時就寝、24時半起きで作業をしています。
学校で製作していたFETの回路図を学校に置き忘れてきたので、
調査の時間に充てました。
24時半~26時までマニュアルを読んで分かったことをまとめると、
-----------------------------------------------------
タイマRA:実は通信ケーブルのCN2-3pin(シリアル受信のポート)が使用可で、
コネクタを差し替えで簡単に使用可(通信とエンコーダカウントの併用可)
タイマRG:タイマRAをCN2-3pinに移すと2相として使用可能
タイマRD:type-S基板のcn4-9(P2_0:前左の方向制御信号)を移設すれば使用可能
---------------------------------------------------
でした。
今回、自律ロボットで使ったのは
タイマRA:x軸方向の移動量確認に使いました。(1相エンコーダ:CN5-9pin)
タイマRG:y軸方向の移動量確認に使いました(1相エンコーダとして:CN5-7pin)
(2相としても使用可でしたが、必要なかった)
でした。しかし!
マイコン実習マニュアル(R8C/38A 版)P488の
33. パルスカウント(プロジェクト:timer_rd_counter)
33.1 概要
を参照すると、5CHでモータをPWM制御する機能を残しつつ、
タイマRDの一部機能もエンコーダカウンタとして使用できることがわかりました。
今回、xy2軸を速度制御(障害物があっても一定速度で超えていく)と位置制御しましたが、
もう1軸増えると心強いものです。
マニュアルをよく見ると、うまくできているとあらためて感じます。感謝。

↑クリックすれば拡大画像が得られます。
H19年度から使われている石川県版のセンサが断線しにくい理由は写真の通りです。
応力集中を防ぐ末端処理と、配線途中のR形状が施されています。
線も太め。
ロボットでも同様にノウハウを採用。
タイトルはDREAMS COME TRUE の歌の題名です。
マイコンカーの大会直前は金曜日だから
ではなく、例のロボット強化の事業に係る
↓ (この「係る」という言い回しが「書類書きすぎ病」になっていますね)
モータドライブ基板type-S基板に別添のFETを加える工事をしています。
(この「別添」という言い回しも「書類書きすぎ病」・・・・・・・・・・・・)
type-S基板のFET間のピッチが3.81[mm](=1.27[mm]x3)とのことなので、
1.27mmピッチのピンヘッダから取り出し、ヒロセ電機のHIF3F-40PA-2.54DS
へ楽につなぐ基板を制作。
金曜日で結線ばかりしているから「ケッセンは金曜日」というだけです。
連日2時起きで仕事をしているので、「血栓は金曜日」か?
ちなみに、私が指導しなくなった本校の生徒のマイコンカーのカーネームは
「県工第一」と「県工二の次」とのこと。ダジャレもいい加減にしてほしいものです(笑)。

結局80A級のP,NchのFETを2枚並列で動かす回路を作成することとしました。
回路のレイアウトを検討中。相撲ロボットやアメフトの回路を参考に検討中。おもしろいですね。
表面実装のFETを裏と表にミラー上に配置の予定。
