








BeagleBoneで動作するRTKLIBで単独測位は確認できたので,
IGS Real-Time Serviceの精密歴を使ってPPPを試してみます.
基本的には,ここで試したRTKNAVIの設定を,そのまま使います.
Roverには,単独測位と同様にMGEXのCHOFを選びました.
inpstr3-pathにCorrectionのストリームを指定します.
ここでは,rt.igs.orgのIGS01を使います.
inpstr1-type =ntripcli # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr2-type =off # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr3-type =ntripcli # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr1-path =user:password@mgex.igs-ip.net:2101/CHOF7
inpstr2-path =
inpstr3-path =user:password@rt.igs.org:2101/IGS01
inpstr1-format =rtcm3 # (0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:sp3)
inpstr2-format =rtcm3 # (0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:sp3)
inpstr3-format =rtcm3 # (0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:sp3)
Positioning Modeはppp-kin,衛星システムはGPSのみとしました.
ver 2.4.2で実装されたambiguity resolutionのオプションはoffにしています.
pos1-posmode =ppp-kine # (0:single,1:dgps,2:kinematic,3:static,4:movingbase,5:fixed,6:ppp-kine,7:ppp-static)
pos1-frequency =l1+l2 # (1:l1,2:l1+l2,3:l1+l2+l5)
pos1-soltype =forward # (0:forward,1:backward,2:combined)
pos1-elmask =15 # (deg)
pos1-snrmask =0 # (dBHz)
pos1-dynamics =off # (0:off,1:on)
pos1-tidecorr =on # (0:off,1:on)
pos1-ionoopt =dual-freq # (0:off,1:brdc,2:sbas,3:dual-freq,4:est-stec)
pos1-tropopt =saas # (0:off,1:saas,2:sbas,3:est-ztd,4:est-ztdgrad)
pos1-sateph =brdc+ssrapc # (0:brdc,1:precise,2:brdc+sbas,3:brdc+ssrapc,4:brdc+ssrcom)
pos1-exclsats = # (prn ...)
pos1-navsys =1 # (1:gps+2:sbas+4:glo+8:gal+16:qzs+32:comp)
pos2-armode =off # (0:off,1:continuous,2:instantaneous,3:fix-and-hold)
これでPPPの準備が整いました.設定ファイルのppp_bb.confをここに置いておきます.
忘れずにntpdateでBeagleBoneの時計を設定した後に,rtkrcvを実行します.
ubuntu@arm:~/rtklib_2.4.2/app/rtkrcv/gcc$ ./rtkrcv -o ppp_bb.conf
ホスト側のrtkplotに接続すると,PPPの測位結果が表示されます.
 (クリックで拡大)
(クリックで拡大)
ばらつきは小さいのですが,CHOFのアンテナ位置から1mほど離れており,
少しずつその方向へ移動しています.しばらく放置すれば収束するのかな?
CHOFのアンテナ位置は,MGEX station listのFTPサイトからダウンロードできます.
ついでに,htopでCPU usageを調べてみました.
rtkrcvは,10%も使っていないようです.全然余裕があります.
 (クリックで拡大)
(クリックで拡大)
【追記】PPPの結果に1mもオフセットがあるのは,MGEXのlogで提供されている
アンテナ位置が不正確なのかもしれないと思い,小金井の電子基準点を使って,
RTKPOSTでCHOFのアンテナ位置を求めてみました.
RTKPLOTの表示は,デフォルトで最初の測位解がプロットの中心になりますが,
これをCHOFの座標に固定します.
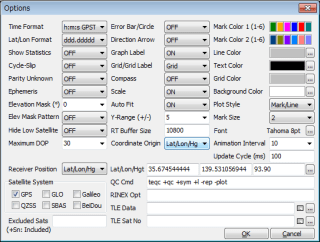
まず,RTKPLOTのOptionsを開き,Receiver PositionにLat/Lon/Hgを選択し,
その隣のコラムにMGEXが提供しているCHOFのアンテナ位置を入力します.
さらに,Coordinate OriginにLat/Lon/Hgを選びます.
これで,プロットの中心がCHOFのアンテナ位置になります.
 (クリックで拡大)
(クリックで拡大)
RTKPOSTの結果を表示してみると,測位結果自体は98%のFIX率で数cm以内に
収まっていますが,MGEXのアンテナ位置からは,経度方向にのみに45cmの
オフセットがあります.
 (クリックで拡大)
(クリックで拡大)
ちょっと大きなオフセットですね.経度方向のみというのも気になる…
IGS Real-Time Serviceの精密歴を使ってPPPを試してみます.
基本的には,ここで試したRTKNAVIの設定を,そのまま使います.
Roverには,単独測位と同様にMGEXのCHOFを選びました.
inpstr3-pathにCorrectionのストリームを指定します.
ここでは,rt.igs.orgのIGS01を使います.
inpstr1-type =ntripcli # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr2-type =off # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr3-type =ntripcli # (0:off,1:serial,2:file,3:tcpsvr,4:tcpcli,7:ntripcli,8:ftp,9:http)
inpstr1-path =user:password@mgex.igs-ip.net:2101/CHOF7
inpstr2-path =
inpstr3-path =user:password@rt.igs.org:2101/IGS01
inpstr1-format =rtcm3 # (0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:sp3)
inpstr2-format =rtcm3 # (0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:sp3)
inpstr3-format =rtcm3 # (0:rtcm2,1:rtcm3,2:oem4,3:oem3,4:ubx,5:ss2,6:hemis,7:skytraq,8:sp3)
Positioning Modeはppp-kin,衛星システムはGPSのみとしました.
ver 2.4.2で実装されたambiguity resolutionのオプションはoffにしています.
pos1-posmode =ppp-kine # (0:single,1:dgps,2:kinematic,3:static,4:movingbase,5:fixed,6:ppp-kine,7:ppp-static)
pos1-frequency =l1+l2 # (1:l1,2:l1+l2,3:l1+l2+l5)
pos1-soltype =forward # (0:forward,1:backward,2:combined)
pos1-elmask =15 # (deg)
pos1-snrmask =0 # (dBHz)
pos1-dynamics =off # (0:off,1:on)
pos1-tidecorr =on # (0:off,1:on)
pos1-ionoopt =dual-freq # (0:off,1:brdc,2:sbas,3:dual-freq,4:est-stec)
pos1-tropopt =saas # (0:off,1:saas,2:sbas,3:est-ztd,4:est-ztdgrad)
pos1-sateph =brdc+ssrapc # (0:brdc,1:precise,2:brdc+sbas,3:brdc+ssrapc,4:brdc+ssrcom)
pos1-exclsats = # (prn ...)
pos1-navsys =1 # (1:gps+2:sbas+4:glo+8:gal+16:qzs+32:comp)
pos2-armode =off # (0:off,1:continuous,2:instantaneous,3:fix-and-hold)
これでPPPの準備が整いました.設定ファイルのppp_bb.confをここに置いておきます.
忘れずにntpdateでBeagleBoneの時計を設定した後に,rtkrcvを実行します.
ubuntu@arm:~/rtklib_2.4.2/app/rtkrcv/gcc$ ./rtkrcv -o ppp_bb.conf
ホスト側のrtkplotに接続すると,PPPの測位結果が表示されます.
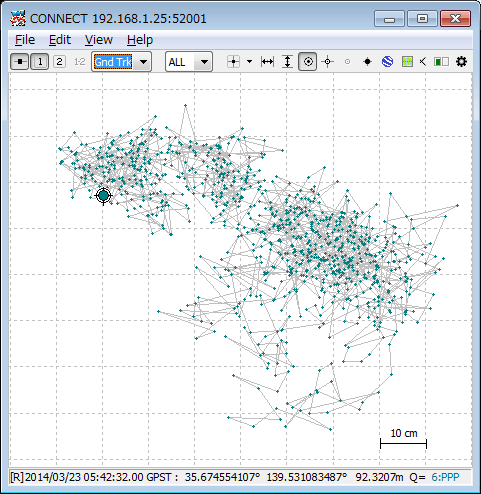 (クリックで拡大)
(クリックで拡大)ばらつきは小さいのですが,CHOFのアンテナ位置から1mほど離れており,
少しずつその方向へ移動しています.しばらく放置すれば収束するのかな?
CHOFのアンテナ位置は,MGEX station listのFTPサイトからダウンロードできます.
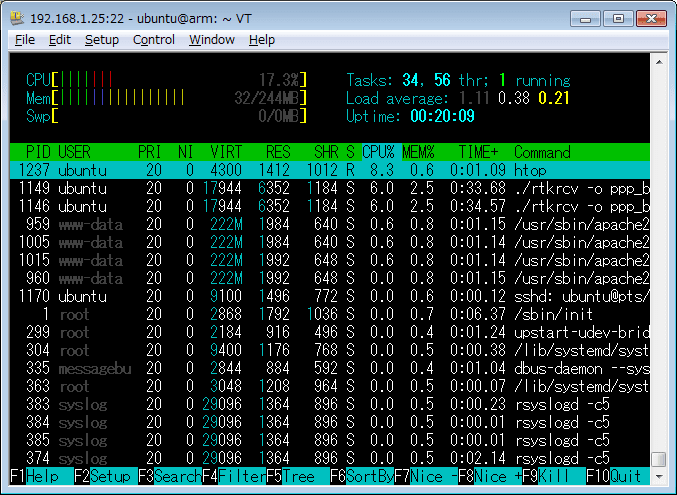
ついでに,htopでCPU usageを調べてみました.
rtkrcvは,10%も使っていないようです.全然余裕があります.
 (クリックで拡大)
(クリックで拡大)【追記】PPPの結果に1mもオフセットがあるのは,MGEXのlogで提供されている
アンテナ位置が不正確なのかもしれないと思い,小金井の電子基準点を使って,
RTKPOSTでCHOFのアンテナ位置を求めてみました.
RTKPLOTの表示は,デフォルトで最初の測位解がプロットの中心になりますが,
これをCHOFの座標に固定します.
まず,RTKPLOTのOptionsを開き,Receiver PositionにLat/Lon/Hgを選択し,
その隣のコラムにMGEXが提供しているCHOFのアンテナ位置を入力します.
さらに,Coordinate OriginにLat/Lon/Hgを選びます.
これで,プロットの中心がCHOFのアンテナ位置になります.
 (クリックで拡大)
(クリックで拡大)RTKPOSTの結果を表示してみると,測位結果自体は98%のFIX率で数cm以内に
収まっていますが,MGEXのアンテナ位置からは,経度方向にのみに45cmの
オフセットがあります.
 (クリックで拡大)
(クリックで拡大)ちょっと大きなオフセットですね.経度方向のみというのも気になる…















※コメント投稿者のブログIDはブログ作成者のみに通知されます