








サマースクールの合間に,小型衛星用GPS受信機の
測位アルゴリズムを改修.ダイナミクスに制限のある
カルマンフィルタではなく,シンプルに最小二乗法を
実装しました.
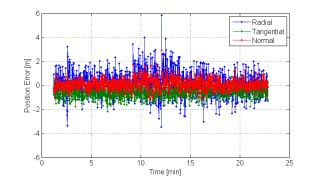
GPS信号シミュレータの衛星シナリオで試験したところ,
Radial方向のオフセットがほぼ解消されました.
まだRadial方向とTangential方向に数十cmほどの
オフセットがありますが,これを取り除くとなると
大赤字大改修になりそうなので,これで良しとします.
 (クリックで拡大)
(クリックで拡大)
 (クリックで拡大)
(クリックで拡大)
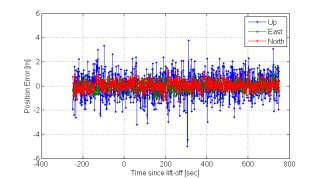
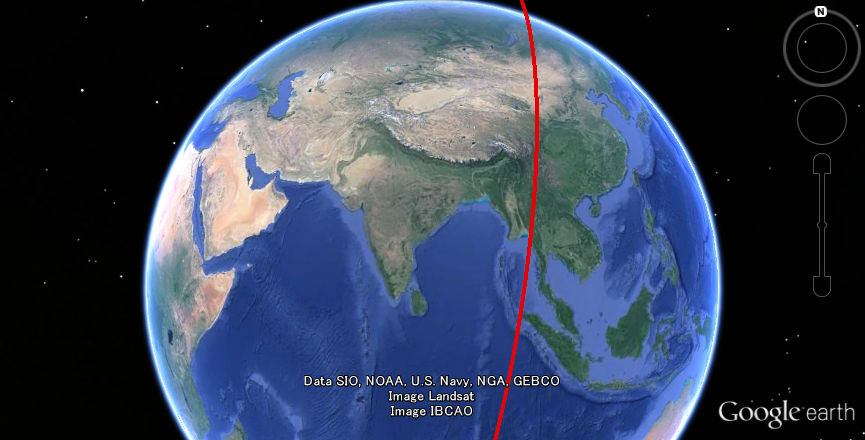
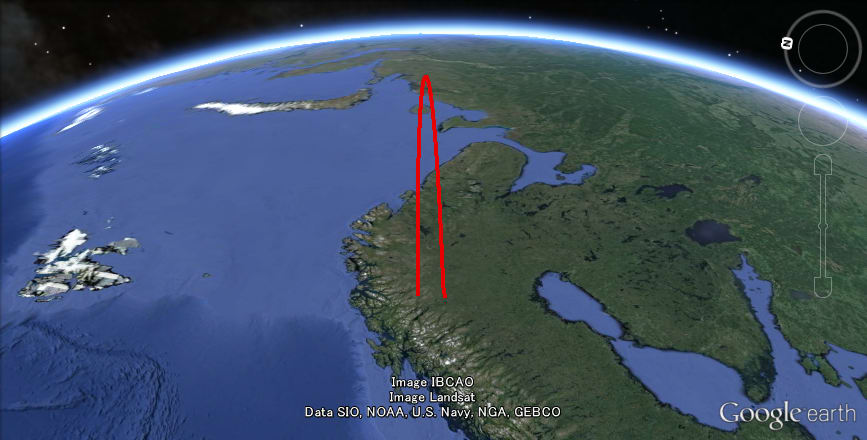
もちろん,ロケットでもいける!
 (クリックで拡大)
(クリックで拡大)
 (クリックで拡大)
(クリックで拡大)
自作受信機の意味ねーな.
測位アルゴリズムを改修.ダイナミクスに制限のある
カルマンフィルタではなく,シンプルに最小二乗法を
実装しました.
GPS信号シミュレータの衛星シナリオで試験したところ,
Radial方向のオフセットがほぼ解消されました.
まだRadial方向とTangential方向に数十cmほどの
オフセットがありますが,これを取り除くとなると
 (クリックで拡大)
(クリックで拡大)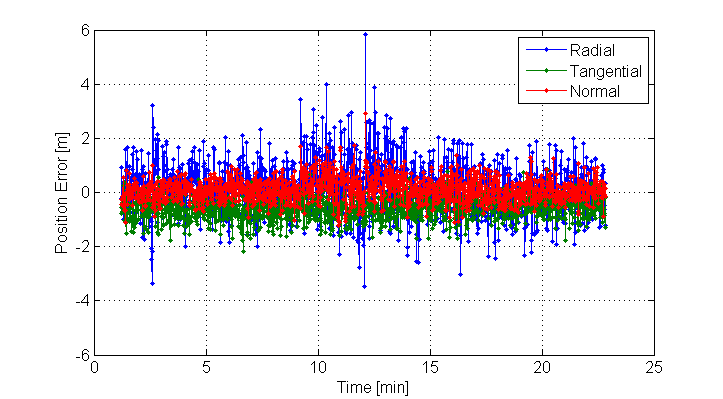 (クリックで拡大)
(クリックで拡大)もちろん,ロケットでもいける!
 (クリックで拡大)
(クリックで拡大) (クリックで拡大)
(クリックで拡大)自作受信機の意味ねーな.













※コメント投稿者のブログIDはブログ作成者のみに通知されます