








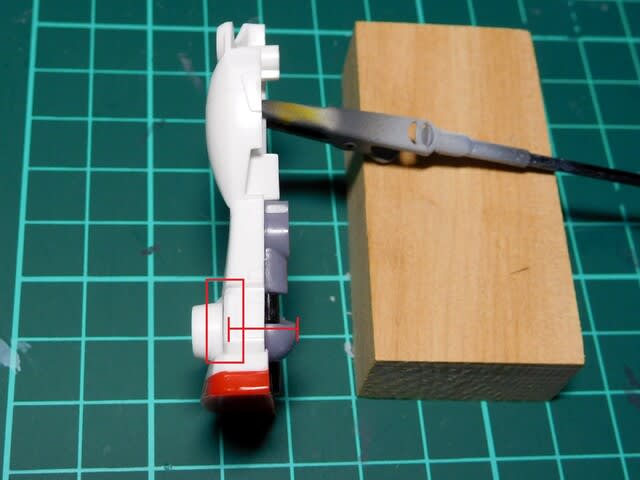
足の接地性について、最初の方にもチラッと書きましたが、踵が大きくて足首に干渉するため、
キットのままではHGUC版のように足裏を地につけたまま大きく傾けて(脚を広げて)立たせることができません。

幅を詰めることができれば簡単なのですが、関節部が『MSジョイント』というちょっと変わった構造になっていて、
簡単に狭めることができないというーー。

幅を詰めると、下のジョイント受け側が入らなくなる。
散々悩み、踵の形状を変えてみることにしました。
足首と干渉する部分さえ狭くなればーーという考えです。
設計したのがコチラ。足の甲側。

踵側。

プリントアウトに待つこと2時間。
元の踵を切り飛ばし、自作パーツを仕込むとーー、

多少は傾けらるようになった??(写真左)
一応元のままでも脚自体は広げられるので、あくまで接地性が気になる人にしか伝わらない内容です(苦笑)。
基本的に浮いた状態で作りましたが、まだちょっと周りに当たっている箇所もあり、現物でもう少しサイズ調整します。
次はいよいよ3Dスキャナー!















