








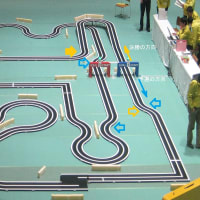
でも、直線の最高速からR450に突入する際、設定速度も大切ですが、
実は駆動力の方が影響が大きいという話が挙がってきています。
実際、最高速からの突入は、フィードバックなしのシーケンス的な制御で、
あるときにある駆動力、あるときにある駆動力という具合にして、カーブへ突入しています。そして1枚目のR450カーブで安定状態へ持って行っています。
(通常走行プログラムに戻しています)
その話の中で、リアのモータは1輪2モータで、フロントは1輪1モータ。だから駆動配分はフロントを理論式より多めにしなくても良いの?という話も挙がってきました。
そういえば現状はそんな補正は入れていません。言われてみるとリヤの駆動配分が多めになっているみたいです。
じゃぁ、フロントを多めにしたら、アンダーステアが出るのでは?という話も挙がってきました。
アンダーステアになったら、フロントの駆動力のみ、フリーのようにしたらどうかという話も出てきました。
なるほど、良いかもしれません。
case11(通常走行)プログラムの改良はまだまだ続く様子です。

実は駆動力の方が影響が大きいという話が挙がってきています。
実際、最高速からの突入は、フィードバックなしのシーケンス的な制御で、
あるときにある駆動力、あるときにある駆動力という具合にして、カーブへ突入しています。そして1枚目のR450カーブで安定状態へ持って行っています。
(通常走行プログラムに戻しています)
その話の中で、リアのモータは1輪2モータで、フロントは1輪1モータ。だから駆動配分はフロントを理論式より多めにしなくても良いの?という話も挙がってきました。
そういえば現状はそんな補正は入れていません。言われてみるとリヤの駆動配分が多めになっているみたいです。
じゃぁ、フロントを多めにしたら、アンダーステアが出るのでは?という話も挙がってきました。
アンダーステアになったら、フロントの駆動力のみ、フリーのようにしたらどうかという話も出てきました。
なるほど、良いかもしれません。
case11(通常走行)プログラムの改良はまだまだ続く様子です。







自分のマイコンカーも前は1個で後ろは2個モーターを使ったギアボックスを使っています。
自分の手で作ったのでかなり失敗しました。
自分もプログラムをどうすればよいか悩んでます。というかその前にサーボの感度が悪いです。ディップスイッチの値をかえても、プログラムのiSetAngleの値を変えてもほぼかわりません。
モーターの外輪と内輪の差を大きくするしかないのかなと思っています。
3年は450Rは3.5m/sの設定でした。
もう少し早く旋回するにはと色々試した結果、サーキットの狼の幻の多角形コーナリングとなりました。
突入→ブレーキ→減速→通常走行です。
450も通常走行の中に組み入れてあります。
450R1枚目で減速、姿勢制御も同じです。
ただ、駆動配分を変えてブレーキで曲げる、ここから先は秘密!
anaservo2008.cの
/* PWMの上限の設定 */
if( iRet > 50 ) iRet = 50; /* マイコンカーが安定したら */
if( iRet < -50 ) iRet = -50; /* 上限を90くらいにしてください */
iServoPwm = iRet;
私たちのプログラムはその制限を緩和し、99%まで使いきれるようになっています。
この部分は問題ありませんか?
また、実際にPWM値がいくらで指示されているかをログで確認しています。もしかするとまだゲイン(Pの値)が小さいのかもしれません。
帰宅するのは24時前になりそうです。
そして明日は6時発です(汗)
こちらの最高速からのカーブは
ブレーキ→突入→4m/sぐらいでパーシャル加速しているがカーブの抵抗で結果的に減速→通常走行
といったところです。
最近は駆動配分で曲げたり止めることはせず、どんどん前に行け行けの駆動配分がみんなに支持されています。
サーボも中立付近はだら~んとしたもので、ディジタル信号が動作すると一気に動くようになっています。生徒にはこちらの方が評判が良いみたいです。
大沢野さんの走りの動画を見ていると、中心以外のディジタルセンサーもピカピカ光っていたので、これでもよいのかもしれません。
今までにない走りのスタイルになって来ました。
デジタルセンサーが灰色を捉えると通常走行パターンを抜けます。
デジタルセンサーと、センサーアームの角度を見て処理します。
直進している時は、サーボは角度保持程度のP値でよいのでは。
センサー処理でハンドルセンターは鈍感にしてあります。
書類の山に埋もれています。明日締め切りです。
新しいCAD・CAMソフトだけ決済もらいました。
明日あたり到着すると思います。MILとWireがセットになっています。
到着が待ち遠しいです。
新たにmode3のハイブリッド制御としてプログラムを製作すると面白いかもとかんがえています。
あと、現在の問題はライントレースのP値が低いため、クランクやレーンチェンジ直後にラインを掴みきれないことがあることです。
従って完走する確率は今のところ低く困っています。
PWMの上限の設定の数値が低いのかもしれません。
いろいろ実験してみて、前輪より後輪のほうが電圧が高いことがわかりました。実験って
大切ですね。
あと、アームの取り付け剛性とアーム自身の剛性と、他にも重量と長さが心配です。
剛性はあればあるほど良くて、ライン制御をした状態で手でセンサを持ち、持ち上げずに灰色部分までずらしてみてください。
そのときにゆがんでしまっていてはいけません。部品取り付けのガタもすぐに発見できます。
あと、ライン制御のときと角度制御のときに、むりやり手でずらしたときのサーボのモスキート音を比較してください。最大の音が違うと最大設定が違っているのだと思います。
あと、サーボの話以外の、前輪と後輪の電圧の違いについてですが、
出てくる電圧は、タイヤの回転数によっても違う値が出てくると思います。(逆起電力?)
このあたりをどのように理論的に説明して、「たぶんOKだろう」というところまで持っていくところが、mcrのおもしろいところだと思います。