








mbed HRM1017 + RCBController で、タミヤのタンクを動かして見ましたので紹介します。
使用したもの
・Bluetooth LE対応のiPhone/iPad
・mbed HRM1017 (Bluetooth LE対応のマイコンモジュール)
・BLE_RCBController2_Motor (RCBControllerでモータを制御するためのmbed HRM1017用ファーム)
・RCBController (iPhone/iPadをゲームパッド風にするアプリ)
・モバイルバッテリー(HRM1017用)
・エネループ(モータ用)
・電池BOX (SW付が便利)
・タミヤの「ダブルギヤボックス」または「ツインモーターギヤーボックス」と「トラック&ホイールセット 」
・その他 ブレッドボード、ケーブル類
制作手順
手順1:mbed HRM1017にファームを書き込む
ここからファームのソースをmbedコンパイラにインポートし、コンパイル&書き込みをします。
mbed HRM1017の使い方はこちら。
手順2:mbed HRM1017とデュアルモータードライバの配線
mbed HRM1017とデュアルモータードライバをこのように配線します。
ノイズ対策のコンデンサーは必要に応じて適宜取り付けてください。


手順3:配線とファームの動作確認
RCBController をiPhone/iPadにインストールして動作確認をしてみます。
iPhone/iPadでRCBControllerを起動して接続、左十字ボタンでモータが動けばとりあえずOKです。

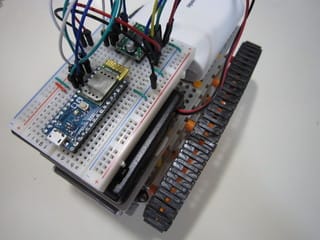
手順4:車体組み立て
車体を組み立て、ブレッドボードその他を取り付けます。
私は手抜きで両面テープで固定しただけです。
mbed HRM1017とモバイルバッテリーはUSBケーブルで接続します。


手順5: 完成後の調整
電源は mbed ー>モータの順に投入。切るときはその逆の順番です。
iPhone/iPadでRCBControllerを起動して接続、十字ボタンで操縦できればOKです。
モータの回転方向が違っているときはモータドライバとモータの配線を逆にしてみてください。
RCBControllerでの操縦には次の4種類あります。
それぞれ動きが異なりますので試してみてください。
・左十字ボタン
・左のみアナログ
・右のみアナログ
・両方アナログ
動画はこちら。
mbed HRM1017 + RCBController で、タミヤのタンクを動かしてみた。
ー以上ー
参考リンク
・mbed HRM1017(Bluetooth LE対応のマイコンモジュール)
・RCBController(iPhone/iPadをゲームパッド風にするアプリ)










・BLE_RCBController2_Motor (RCBControllerでモータを制御するためのmbed HRM1017用ファーム)をコンパイルするとBLEDevice.hが見つからないというエラーが出てしまうのですが、どうすれば良いのでしょうか? 対処方法をお教えください。