








ここでは、(その1)で使ったプログラムの紹介をします。
【”Lifecam”をUDP画像送信に改造】
手順1 必要なプログラムをインポートする。
”LifeCam”をインポートする。
”LifeCam”に、”EthernetNetIf”ライブラリをインポートする。
手順2 ソースコード修正
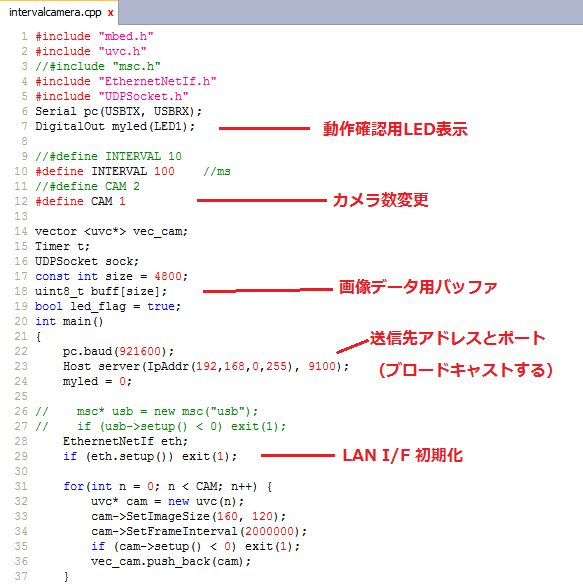
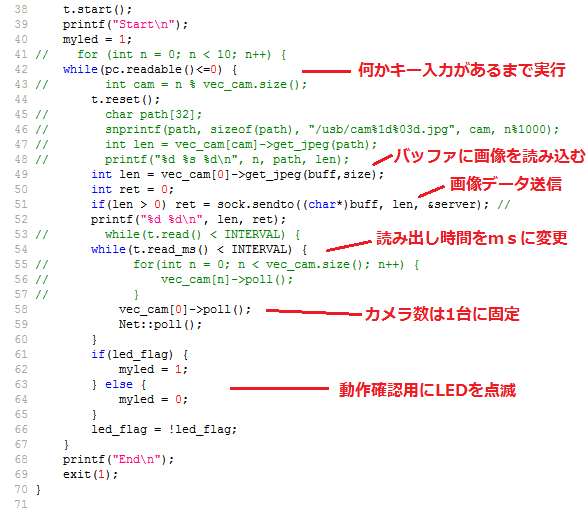
”intervalcamera.cpp”を以下のように修正する。
変更点が分かるようにオリジナル部分はコメントとして残してあるので、少し見づらくなってしまったかもしれない。
送信先アドレスは、必要に応じて変更する必要がある。
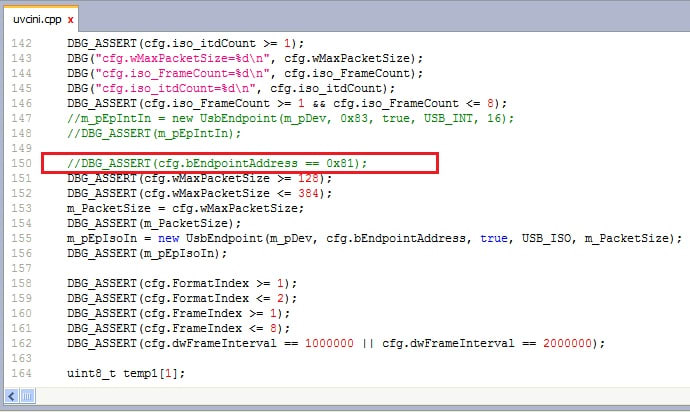
Webカメラ”ELECOM UCAM-DLA200HBK”を使用するとき。
手順3 動作確認
DHCPを使っているので、DHCPサーバがある環境で動かす必要がある。
-以上―
【PS VitaでUDP受信した画像を表示】
手順1 プロジェクト作成
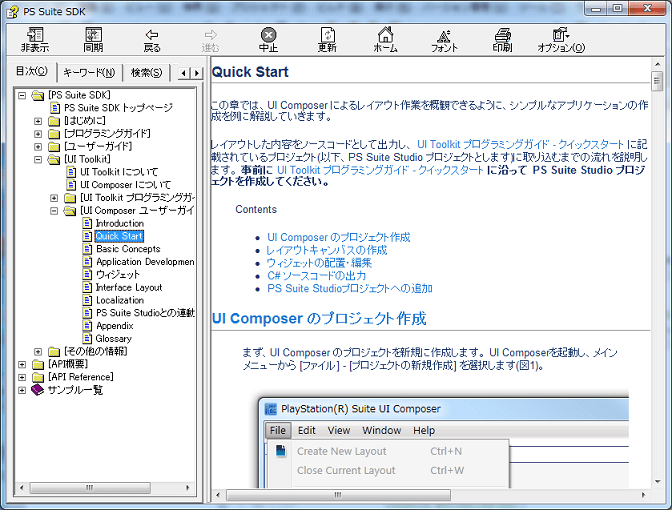
PlayStation Suite SDK 0.98(PlayStation Mobile SDK)はすでにインストールされているものとする。
”SDK Documents”の”Quic Start”に従い、ImageBox一つ、Label一つ、Button一つ、のプロジェクトを作成する。
そして、シミュレータや実機で正常に動作することを確認しておく。
手順2 ソースコード修正
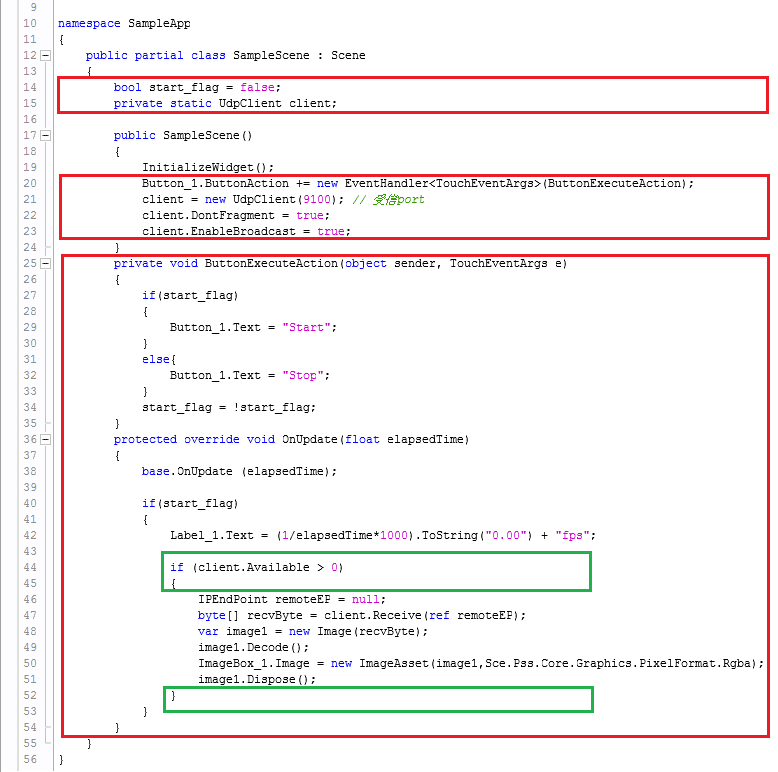
”SampleScene.cs”を以下の様に修正する。
手順3 動作確認
実機で実行するときは上記緑枠部分はコメントにしておく。
シミュレータでは正常に動くのだが、実機だとなぜか”client.Available”の部分で固まる。
この影響で、実機で動かすときは画像送信側を先に動かしておかないとVitaが固まる。
シミュレータで動かすときは、特に順番は気にしなくてもよい。
その他実機では、しばらく動かしていると固まるなど、まだいくつか未解決の不具合がある。
-以上―
ついでなので、Android版も。
【AndroidでUDP受信した画像を表示】
手順1 Processing for Androidの開発環境構築と動作確認
Processing for Androidの開発環境を構築し、実機でサンプルプログラムが正常に動くことを確認しておく。
私が動作確認に使ったのは、”processing-2.0a6”+”ICONIA TAB A500 Android3.2.1”。
環境構築に関してはいろいろな人が詳しく解説されているので、ここでは省略します。
こういう解説本もあります。
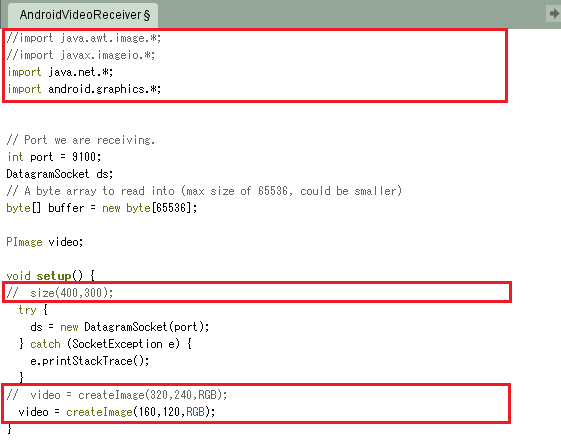
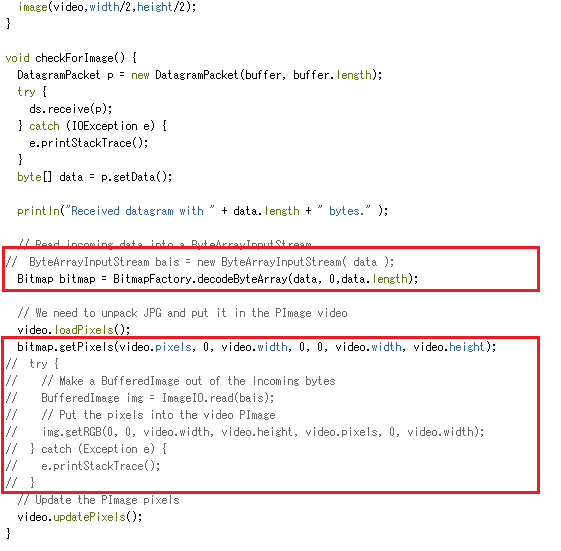
手順2 ソースコード修正
下記サイトから、”image_streaming.zip”をダウンロードし、”VideoReceiver”を以下のように修正する。
・Streaming video with UDP in Processing
//------------------------- 途中省略 -----------------------------------------
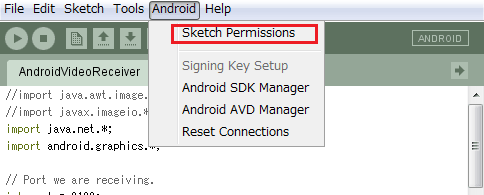
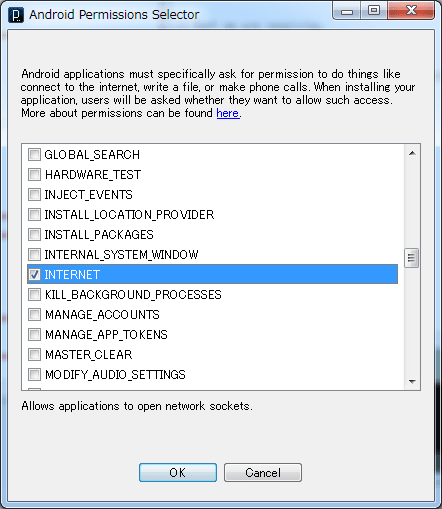
手順3 Permission設定
以下のようにPermissionを設定しておく。
その3へ、つづく。









