








カメラの動作確認は一通り終わったので、今度はサーボモータと組み合わせて物体追跡をやってみたい。
mbed内で画像処理―>サーボ制御まで完結できるか試す。
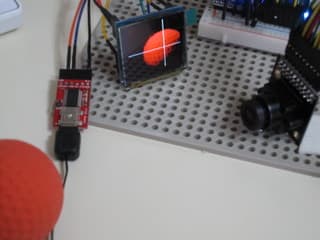
まず、カラートラッキングをやってみた。画像処理もmbedでやっている。
画像処理に関しては以下を参考にさせていただいた。
mbedの画像処理を少し改良。ノイズの影響を受けにくくした。
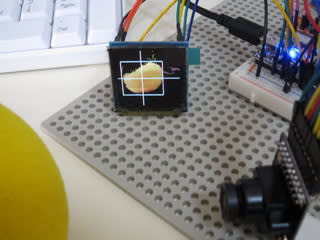
mbedだけでカメラ画像取得、画像処理、画像表示までやって、そこそこ動くことが分かった。
表示をやめればもう少し速くなる。動画はこちら。
mbed + トラ技カメラBでColorTrackingの実験。
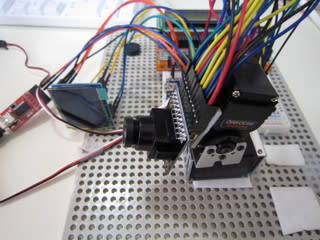
次はいよいよサーボモータと組み合わせて物体追跡。
サーボモータは、双葉電子のロボット用サーボモータRS304MD-FF使用。
TTLコマンド(シリアル)方式でmbedと通信している。
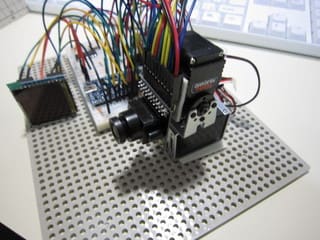

mbedだけでカメラ画像取得、画像処理、サーボ指令値計算までやってみた。一応追従している。
動画はこちら。
mbed + トラ技カメラB + サーボモータでボール追跡の実験。
―以上―









