こんばんは
今日の巨人戦はデーゲーム
昼前にスーパーに行って帰ってきたのが11時半
すぐラーメンを作ってお昼ご飯を食べて、12時からは鑑定団の再放送
3chでは試合前のスペシャル番組をやっているんですが、ワーワー行っているだけなので、5chのフロントドアという番組を見ていました
これは宇治原君とかが出てカープのことを色々と掘り下げてくれる番組です
2時からはいよいよ3chで試合開始
今日はほとんど歩いてないなぁ
と思いつつ結局5時半までじっとして見てしまいました
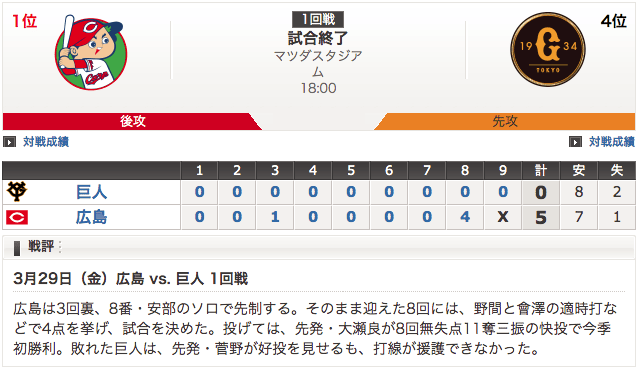
結果は負け

巨人の先発ヤングマンを打てず、結局鈴木のホームランのみ
巨人はカープの先発床田を打ち4点
続くルーキー島内が初先発に舞い上がってさらに1点献上
巨人に移籍した丸は今日も5打席でノーヒット、3つのフォアボールを選んだのはさすがなんですが、調子が出遅れていますね
まだ2試合だけでなんとも言えませんね・・・
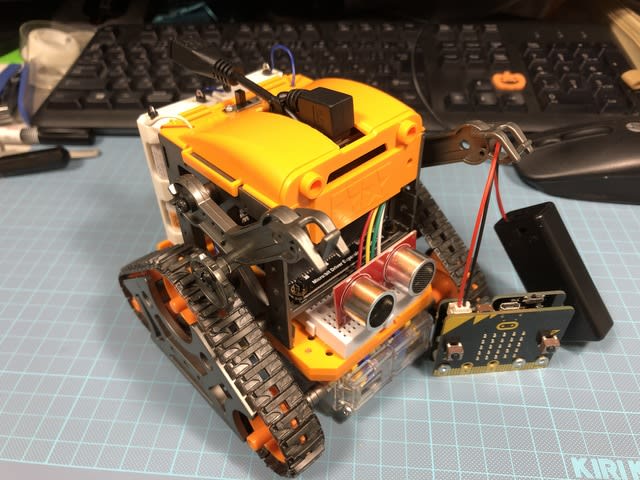
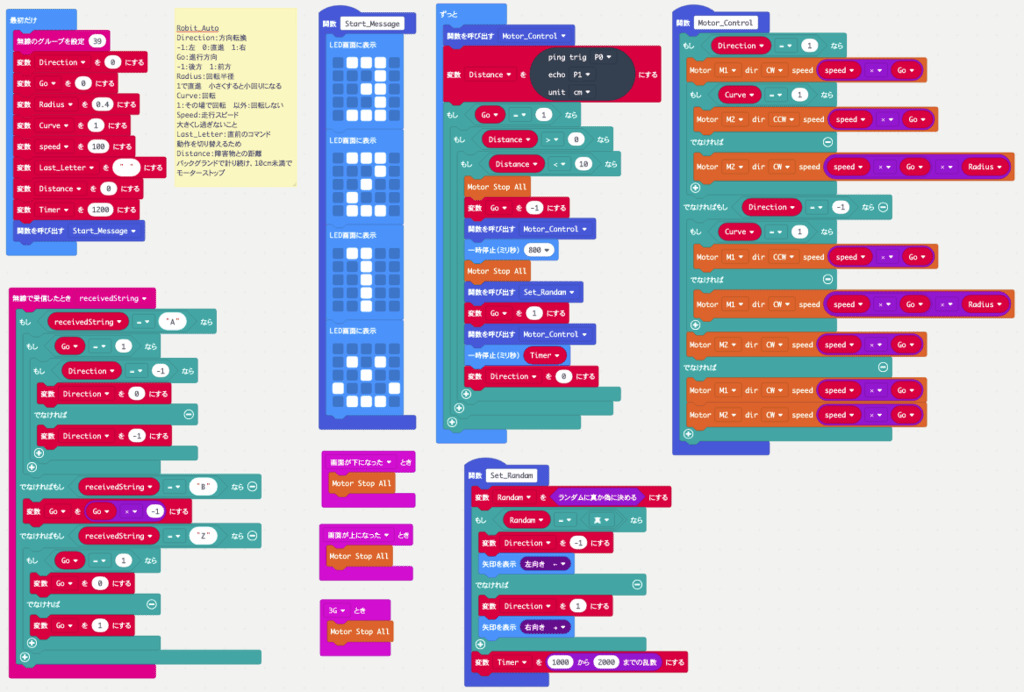
micro:bitのロビット君は今度(少し先になりますが)サーボモーターを使って超音波センサーをレーダーの様に左右に振ろうと思っています
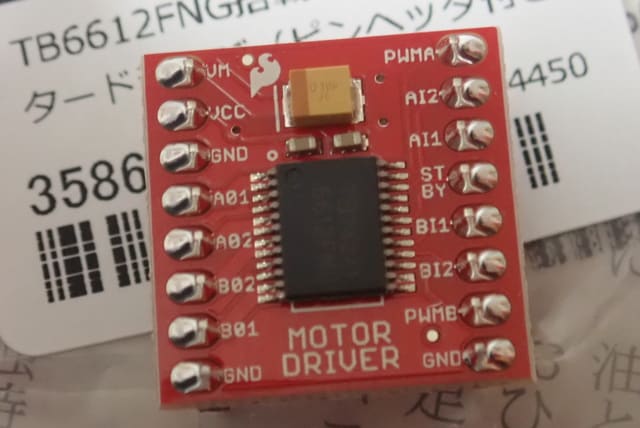
そのための準備としてはまずサーボモーターなんですが、色々と調べて秋月電子通商という秋葉原のお店の通販で見つけました

これを二つずつ注文してみようと思います
左のほうは左右90度で動作し、右のほうは回転するので車輪の様に使うこともできます
サーボモーターはDCモーターと違って回転角などがかなり正確に実現できるものです
左のほうのサーボを使ってロビット君の全面にセンサーをつけるつもりなんですが、架台をなんとかしないといけません
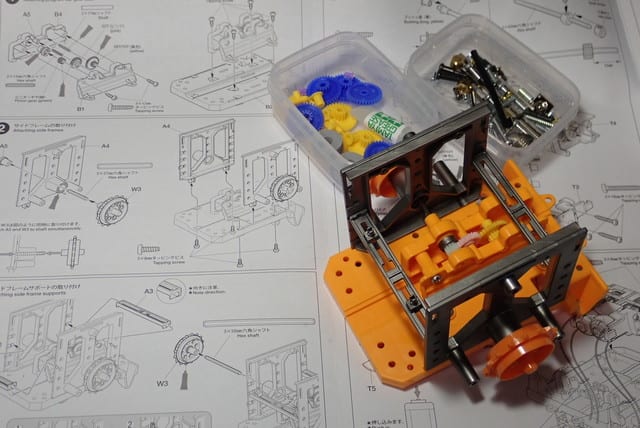
そこで検討しているのがタミヤのユニバーサルプレートなどです

これをちょうどいい大きさに切ってロビット君にネジ付けしようと思います
超音波センサーを左右30度ほどの範囲で1秒周期ぐらいで振れば前方の障害物はほぼ検出できると思います
だんだんエスカレートしてきて、軽く始めたことですがかなりのめり込んできている様です
本当の目的は子供達に電子工作を通じてプログラミングの面白さを伝えようと思っているのですが、まずは自分が楽しむことから・・・
ですね
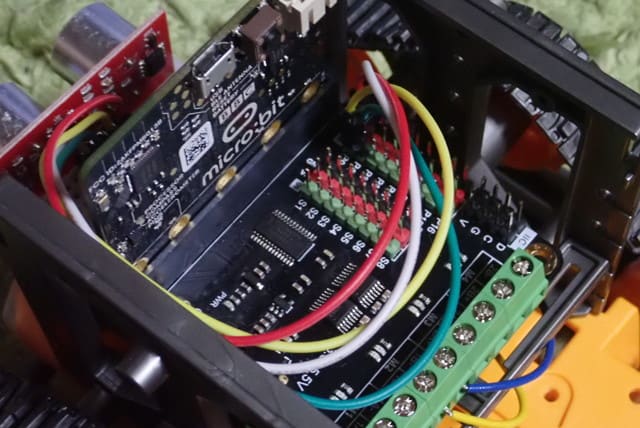
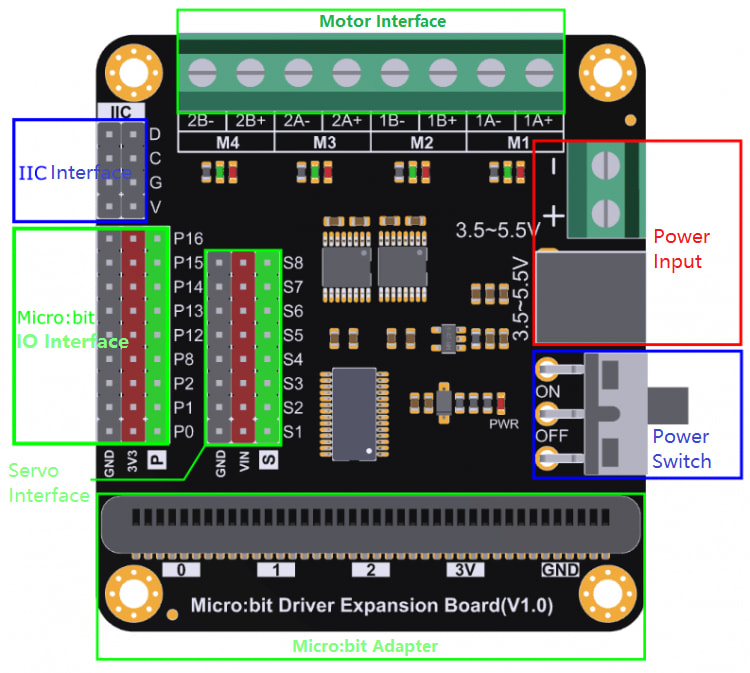 Servo Interfaceのところにつなげばできそうです
Servo Interfaceのところにつなげばできそうです