








TTLコマンドサーボのDynamixel AX-18Aを動かしてみた。
まずはいろいろパーツの準備。
使うのは電源コネクタ変換基板。

ハンダ付け完了。

まずは、USB-シリアル変換モジュールでPCから動かしてみる。
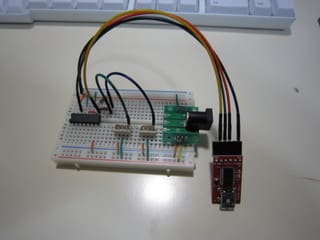
実験回路できた。
回路はここを参考にさせていただいた。
C#で作った動作確認プログラムで動作確認できた。
動作確認プログラムは、以前RS304MDの実験に使ったプログラムを改造したもの。
また、事前にコンフィグレーターでAX-18Aの通信速度を115200bpsに変更しておいた。

次はmbedからの動作実験。
mbedからも動作確認できた。

―以上―









