近藤科学のサーボモータ、KRS-2542HVのバルク版を入手。
KRS-2542HVは車輪用の回転モードがあるらしいので遊んでみた。

まず、KRS-2542HVを動かすために、ICSコマンドの仕様「シリアルサーボ制御方法(2)ICS編」を見てみた。
通信フォーマットを見るとチェックサム等がないしモータを動かすだけなら簡単そうだ。
KRS-2542HVの単体動作テスト完了。ここを参考にさせてもらった。
PCから C# で作ったテストプログラムで動作するのを確認。

いままでシリアルコマンド式のサーボは、Dynamixel AX-12A、フタバのRS304MD、近藤科学のKRS-2542の3つを使ってみた。
単純に位置を制御するだけだったらKRS-2542が一番簡単だった。
サーボモータのI/F回路は、これの回路例Bを参考にさせてもらった。
この回路ではDynamixel AX-12A、フタバのRS304MD、近藤科学のKRS-2542の3種類のサーボが動いた。
KRS-2542HVの車輪用回転モード使ってみたいのだが、これに簡単につけられる車輪がなかなか見つからない。
いろいろ探した結果、ちょっと加工すればこの組み合わせでうまくいきそうだ。
・Dynamixel AX-12+用タイヤ
・近藤科学 ローハイトサーボホーン
このサーボホーンの出っ張りがタイヤの凹みにピッタリ。
ネジ穴が微妙にずれているので、ドリルで開けなおしてやる。

次はこれをGR-SAKURAボードにつなぐ。
GR-SAKURAでシリアルの偶数パリティ設定はこれで出来るという情報を頂いた。
GR-SAKURAでKRS-2542HVを動かす実験。うまくいった。

回転モードもうまくいった。さて車輪を作ろうかな。

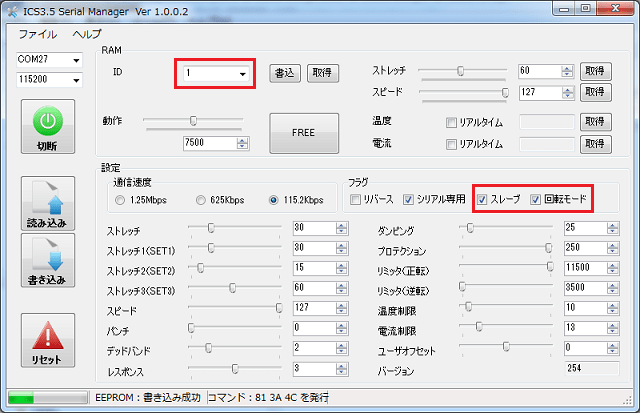
KRS-2542HVの設定内容。
下図のようにIDを変更して、回転モードに設定。
あと、手抜きしてサーボからの応答は見ないので、スレーブにして応答を返さないようにしている。
近藤科学KRS-2542HVを回転モードで使う車輪が出来た。

回転モードで動かしてみた動画はこちら。
GR-SAKURAで近藤科学KRS-2542HVを動かす実験。
回転モードで使う車輪が2個出来た。
ちょうど良い長さのネジが無かったので見栄えは… あと、サーボの固定方法をどうするかが悩ましい。

車体が出来た。サーボはとりあえず両面テープで固定。
後輪はホームセンターで買ったキャスター。高さがちょうど良い。

車体全体を仮組してみた。
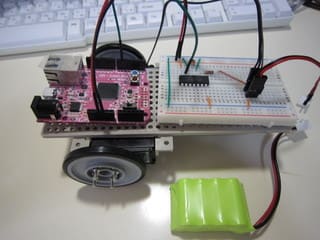
車体が完成したので次はソフトだ。
以前作った”Bluetooth+Wiiリモコン”で操縦できるようにしてみる。
GGR-SAKURAのUSB HOSTにUSB Bluetoothドングルを挿し、Wiiリモコンで操縦できるようにした。
(下の方で出てくるSBXBTモジュールを使った方が簡単かもしれない。)
動画はこちら。
GR-SAKURAで移動ロボットを作ってみた。(1)
今度はWiiリモコンの加速度センサーで動かしてみた。
GR-SAKURAで移動ロボットを作ってみた。(2)
KMR-M6のカメラ制御用にサーボを取られてしまったロボット。
このままではかわいそうなのでKRS-2542HVを追加発注した。

今度は、PS3コントローラで操縦できるようにする。
PS3コントローラを使うためにランニングエレクトロニクスさんのPS3コントローラ版SBXBTモジュールを使用することにした。
PS3コントローラ版ファームウェアはまだ開発中ということだったが、購入時にお願いして書き込んでおいて頂いた。
SBXBTモジュールにはWiiリモコン用ファームウェアもあるので、Wiiリモコンを使いたい場合はランニングエレクトロニクスさんに相談してみると良いかもしれない。
まず、XBeeエクスプローラUSBに付けて単体動作確認した。
特に問題なくサクッと繋がった。
使用したUSB Bluetoothドングルは、”PLANEX Ver3.0+EDR BT-Micro3E1XZ”。
こんどはGR-SAKURAにつないでみる。


GR-SAKURA+KRS-2542HVのロボットにPS3コントローラ版SBXBT取り付けた。
サーボを一個KMR-M6に取られてしまったのでまだ動かせない
XBee用のピンソケットが入手できたらGR-SAKURAに直接取り付ける予定。
GR-SAKURA上のXBee用ソケット使いたいのだがピンソケットの入手で悩む。
通販の送料の方がピンソケットより高くついてしまう。

SBXBTと通信実験をしてみた。SBXBTの通信速度は2400bps。
ぐぬぬ。GR-SAKURAのシリアルポートが2400bpsだと動かないっぽい。
試しに115200bpsで実験にしたらちゃんと動いた。
4800bps以下は設定出来ないバグがあるという情報を頂いた。
-> 対策方法はこちらのルネサスのユーザーフォーラム。(ユーザ登録してログインしないと見れない?)
シリアルポートのバグ対策をして、やっとGR-SAKURAとPS3コントローラ版SBXBTの組み合わせが動いた。
注文していたKRS-2542HVが届いたので、もう一つの車輪も付けなければ…
車輪取付完了、PS3コントローラで操縦できるようになった。
動画はこちら。
GR-SAKURAで移動ロボットを作ってみた。(3)
XBee用ピンソケットを入手したのでGR-SAKURAにハンダ付けして、SBXBTモジュールを載せてみた。
どこも干渉するところは無さそうだ。次は動作確認。

GR-SAKURA上のXBeeソケットにSBXBTモジュールを載せたバージョンできた。
特にトラブルもなくすんなり動いた。ちょうどいい長さのネジが無かったので見栄えが悪い...

(その2)へ、つづく...