Kinect SDK 1.5付属のFacetrackingサンプルプログラムを改造して、顔の回転角をTCPへ出力してみた。
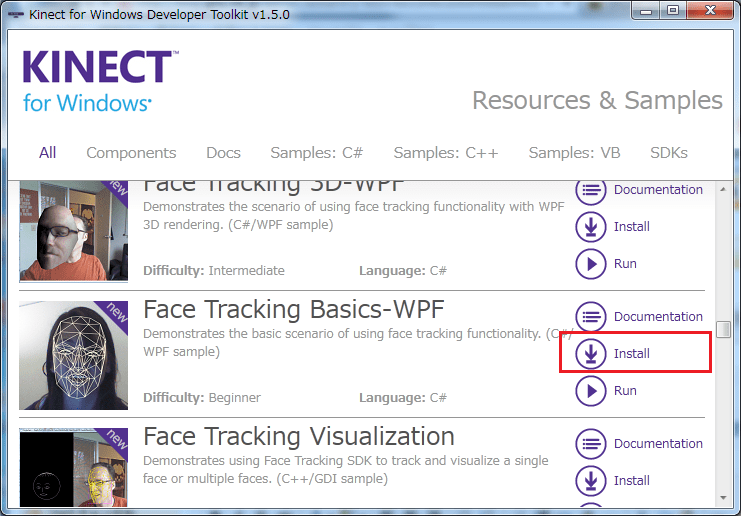
【手順1】サンプルプログラムのソースをインストールする。
”FaceTrackingBasics-WPF”を適当なディレクトリにインストールする。
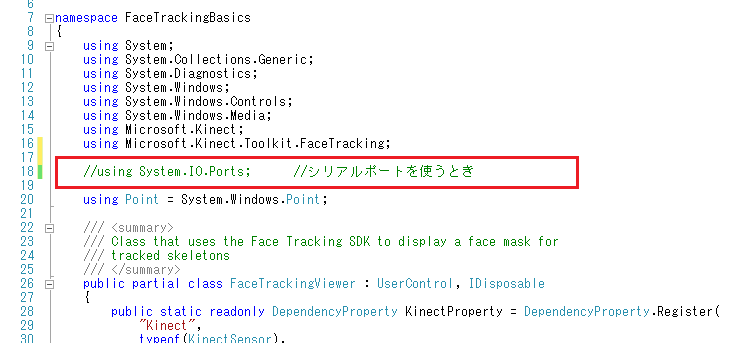
【手順2】プログラムを改造する。
”FaceTrackingBasics-WPF”のソリューションを開く。
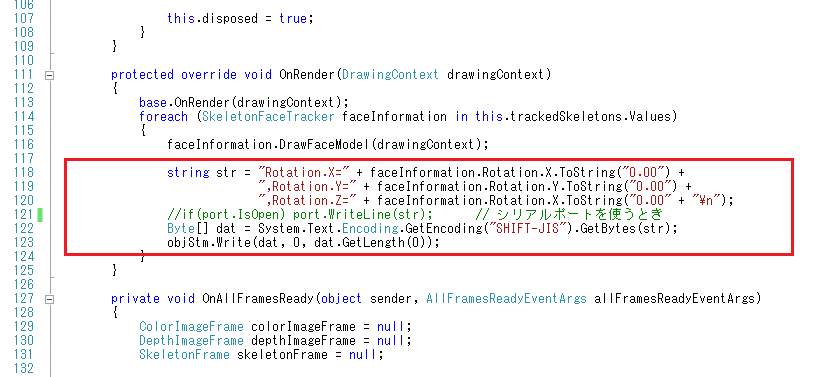
”FaceTrackingViewer.xaml.cs”を開き、下記赤枠のように追加する。
参考として、シリアルポートに出力する例もコメントに入れてある。
注意:異常処理は手抜きしているので必要に応じて追加してください。
------------------------------ 途中省略 --------------------------------------

------------------------------ 途中省略 --------------------------------------
------------------------------ 途中省略 --------------------------------------

------------------------------ 途中省略 --------------------------------------

【手順3】動作確認
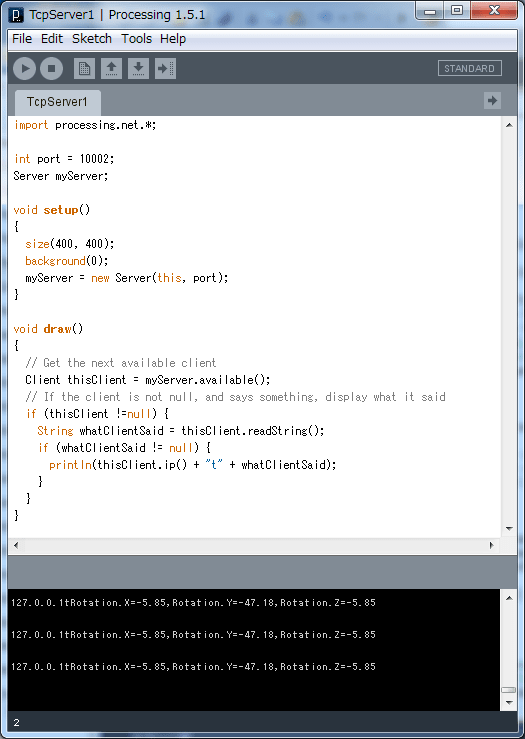
動作確認には、ProcessingのReferenceに載っているサンプルプログラムをそのまま使用した。
このProcessingのTCPサーバーを起動後、FaceTrackingBasics-WPFを起動する。
うまく行けばこのようになるはず。
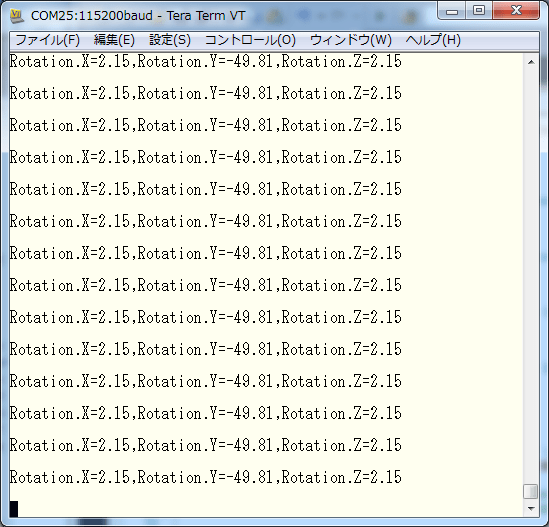
シリアルポートに出力するようにしたときはこんな感じ。
【応用例1】
この記事の改造例をベースに、さらに手を加えてRCサーボモータでWebCameraのパン・チルトを制御してみた。
RCサーボモータの制御にはこれを使っている。

追加の修正個所はこんな感じ。 (2012.9.16追記)
通信コマンドの詳細はこちらを参照してください。
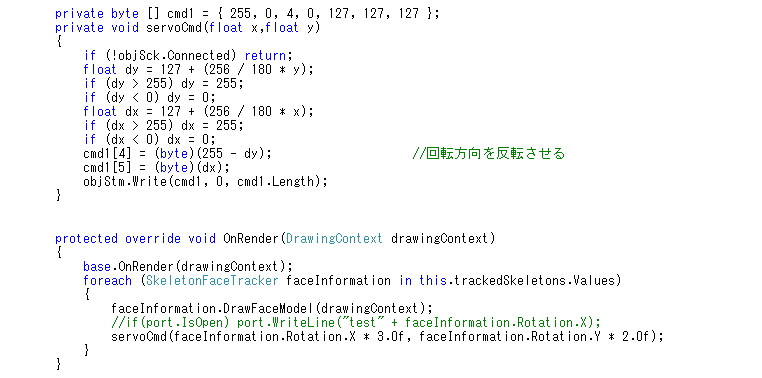
" faceInformation.Rotation.X"と"faceInformation.Rotation.Y"に掛けている係数は、動かしてみて調整する。
【応用例2】
この記事の改造例をベースに、シリアル通信でWebCameraのパン・チルトを制御してみた。
こちらはシリアルコマンド方式サーボモータを使用している。
― 以上 -
関連する記事
・RCサーボモータをmbed+LAN+ProcessingでGUI制御(その1) 【mbed編】
・RCサーボモータをArduinoとProcessingでGUI制御(その1) 【Arduino編】
参考にしたリンク