








午前中は大学院の授業で,
午後からKlab にみんなで集まってdemu の授業の課題・・・・
とりあえず,
パーティクルに棒を付けて,
ロボットのデットレコニングの値に合わせてパーティクルも動くようには出来ました.
たいへんお世話になりました(〃 ̄ω ̄〃ゞ
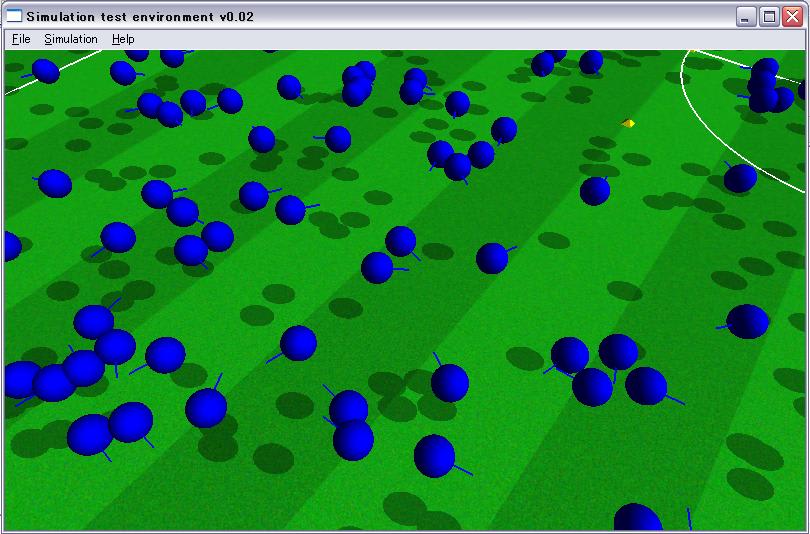
パーティクルの方向が分かるように棒を追加
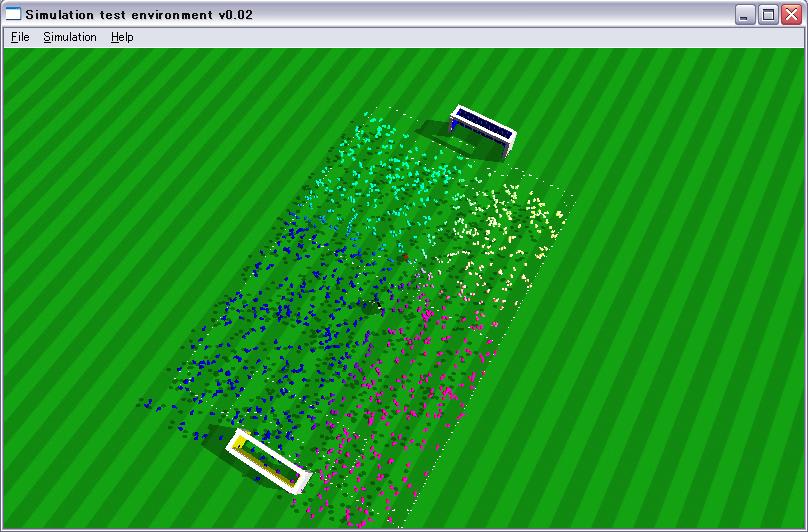
コートからパーティクルが少しはみ出てます.
パーティクルが1000 個もあるとパソコンがすごく重い
カッカがパソコン一台で色々やってた凄さをやっと理解した気分;
パーティクルフィルタについてインターネットで調べてみると,
実装のサンプルプログラムとかその詳しい方法が見つからないのが不思議に思う.
この授業が終わったらできたプログラム公開しようかな??
"できれば"だけど・・・・
午後からKlab にみんなで集まってdemu の授業の課題・・・・
とりあえず,
パーティクルに棒を付けて,
ロボットのデットレコニングの値に合わせてパーティクルも動くようには出来ました.
たいへんお世話になりました(〃 ̄ω ̄〃ゞ
パーティクルの方向が分かるように棒を追加
コートからパーティクルが少しはみ出てます.
パーティクルが1000 個もあるとパソコンがすごく重い
カッカがパソコン一台で色々やってた凄さをやっと理解した気分;
パーティクルフィルタについてインターネットで調べてみると,
実装のサンプルプログラムとかその詳しい方法が見つからないのが不思議に思う.
この授業が終わったらできたプログラム公開しようかな??
"できれば"だけど・・・・



※コメント投稿者のブログIDはブログ作成者のみに通知されます