物体追跡ロボットを作る。
技術的なめどがついたので、いよいよ物体追跡ロボットを作ることにする。
大まかな構成部品は、小型無線カメラCS-W07G-CYとmbed、360度回転RCサーボ。
制御の流れはこんな感じ
無線LANカメラ―>無線LAN(画像)―>PC(OpenCVで画像処理)―>Bluetooth(サーボ指令値)―>mbed―>360度回転RCサーボ―>車輪。
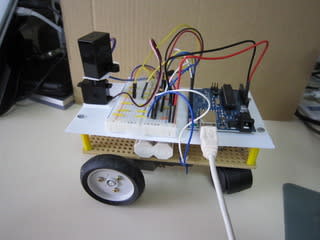
車体はこんな感じになる予定。

パーツの加工やハンダ付けは最小限で作れるようにするつもり。
・駆動部:360度回転RCサーボ使用。車輪はこれ。

・車体:タミヤのユニバーサルプレート使用

ロボット制御部の部品はこれだけ。

配線完了。シンプル。

メモ
仮組。だんだん形になってきた。

デバッグ中の動画はこちら。
デバッグ中の動画、その2。
360度回転RCサーボの特性が左右でかなり異なるので、補正してやらないとうまく行かない。
車輪ロボットタイプはまだ完成していないが、次のターゲットはこれ。
6脚ロボットだと歩行時にカメラが揺れて画像がブレそうだから難しいかな...

つづく...