








12月7日、日本初の金星探査機「あかつき」の金星周回軌道投入は失敗に終わりました。
第5部では、「あかつき」が金星周回軌道投入に向けて噴射を始めてから、軌道投入に失敗し、ようやく地上との通信が確立されるまでの戦いを、「あかつき」の側からの視点で振り返ります。
今回は、時系列で書いてみます。
X月X日 燃料の逆流を防ぐために設置されている逆止弁CV-Fが閉塞。(閉塞の時期や原因は調査中)
12月5日6:10 金星周回軌道投入(VOI-1)のための地上からのコマンドを受信。
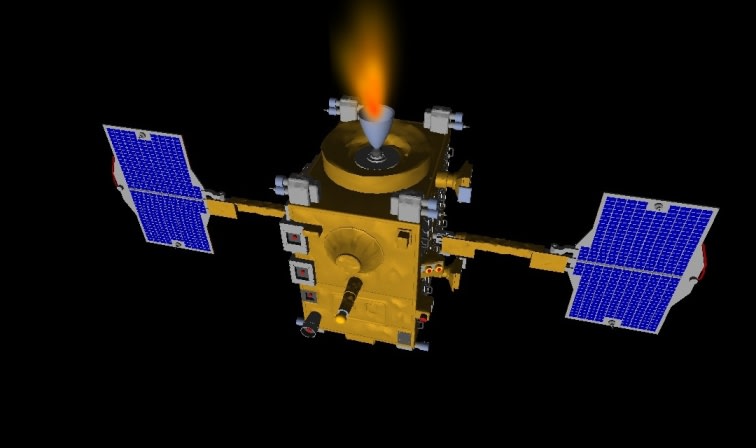
12月6日7:50 軌道制御エンジン(OME)噴射姿勢に変更。高利得アンテナを地上に向けられないため、中利得アンテナでの通信に切り替え。
12月7日8:48:57 定常制御モードから軌道制御モードに切り替え、VOI-1制御開始。まず姿勢制御スラスタ(RCS)4基(AB1~4)によるセトリング開始。

8:49:00 セトリング終了。OME噴射開始。

OME噴射中の姿勢制御はRCSの噴射によって行われる。AB3の噴射が比較的多く行われ、8:50:00以降はAB2の噴射も比較的多くなっていた。AB2噴射とAB3噴射との組み合わせはY軸回転をさせる方向である。結果として姿勢は±2度の精度で安定しており、RCSは適切に機能していた。
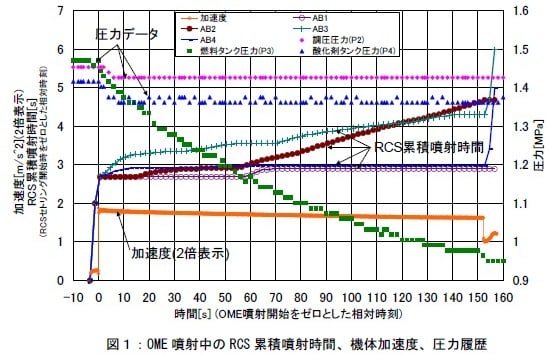
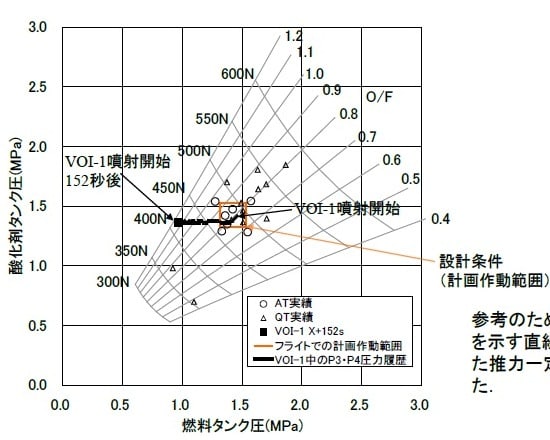
OME噴射開始後、燃料及び酸化剤の消費によって、燃料タンクと酸化剤タンクの圧力は一度低下するが、調圧圧力によって一定に保たれる設計になっていた。しかし、燃料タンクの加圧を行う配管の途中にある逆止弁CV-Fが閉塞していたため、燃料タンクを加圧できず、その後も燃料タンク圧の低下が続いた。
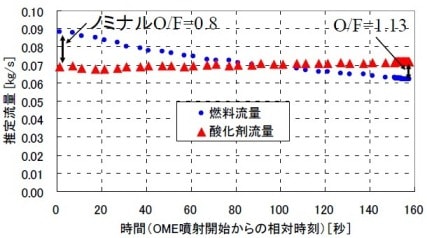
さらに、燃料タンクの圧力低下は、燃料供給量の減少を招いた。酸化剤タンクの調圧は正常だったため、酸化剤供給量は一定だった。そのため両者の混合比は相対的に酸化剤過多の状態となり、OMEの推力は徐々に低下、その結果機体の加速度は徐々に低下していった。やがて、地上試験での想定を逸脱した条件での燃焼状態となる。

8:50:43 地食開始、通信中断。地食とは「あかつき」から見て、地球が金星の陰に入ることであり、地上との通信ができなくなる。これはもともと計画されていたことなので、VOI-1は全て自動シークエンスで行うことになっている。
8:51:32 燃料供給量不足が、突然のOME噴射方向異常を引き起こす。(原因は調査中だが、相対的な酸化剤過多による高温条件へのシフトや、燃料噴射によるフィルムクーリングの不良によって、スラスタやノズルに破損が生じた可能性、異常な条件での燃焼の結果、スロート後方後燃えや不安定燃焼、インジェクタ噴射方向異常の何れかを生じた可能性が検討中)OME噴射方向は通常-Z軸方向だが、噴射方向がやや-Y軸方向に向かって傾いたため、+Y軸方向に力が加わり、この結果+X軸方向の不整トルクが発生した。不整トルクにより機体はX軸を中心に回転を始めた。同時に燃焼の異常により加速度も急激に低下した。


主にX軸周りの(実際には+X軸から9度程+Y軸方向に傾いた軸を中心とした)回転を始めたため、姿勢を維持するため、AB3及びAB4を全力で噴射した。しかし、OME噴射方向異常による不整トルクの発生は3.5秒間続き、RCS噴射にも関わらず、この間に機体の角速度は増加し続けた。



8:51:33 X軸周りの姿勢異常判定指標の大きさがが5Nmを超えた。
8:51:35.5 OME噴射方向の異常は回復傾向を見せ、不整トルクは減少した。RCS噴射により、回転は徐々に減速していった。同時に加速度もやや回復し、安定した。
8:51:36.5 Y軸周りの回転は逆回転に転じ、徐々に元の位置に戻りつつあった。一方、X軸周りの回転は減速したものの、回転は続いていた。
8:51:38 X軸周りの姿勢異常判定指標は5秒間連続で5Nmを上回ったため、姿勢維持が不可能と判断し、軌道制御モードから姿勢維持モードに移行。これによりOMEの燃料及び酸化剤バルブは閉鎖され、OMEの燃焼が中断された。結果、OMEの噴射は計画の720秒間を大きく下回る158秒間しか行われず、減速が不十分だったため、金星周回軌道投入に失敗した。新たな軌道は金星軌道より内側を225日で公転する軌道に。姿勢制御もRCS噴射からリアクションホイール(RW)へと移行。この時点で探査機はX軸周りに11度、Y軸周りに5度傾いていた。


8:52:30 酸化剤タンクの圧力がステップ状に回復。一方、燃料タンクは逆止弁CV-Fが99%以上閉塞していたためヘリウムガスの流入が遅く、圧力の回復に時間がかかった。
8:55:15 姿勢維持モードからセーフホールドモードへ移行。探査機は太陽電池パドルを太陽に向けて、自らはX軸を中心とする回転を始めた。
9:12:03 地食終了。しかし、セーフホールドモードに入っていたこと、軌道投入失敗で予定の位置から探査機がずれていたこと、等によって通信が取れず。
9:15:15 通信系が中利得アンテナから低利得アンテナへ。
9:55 日陰帯に入り、電力供給はバッテリへと切り替わる。
10:26 地上では最初の「あかつき」からの電波をキャッチ。
11:01 中利得アンテナへ切り替え。
11:04 日陰帯を出て、太陽電池からの電力供給を再び受ける。
11:30 調圧圧力が低下して、燃料タンク圧と同じ値に収斂。以降、テレメトリデータに明らかな異常は見られない。
12:29 通信確立せず、低利得アンテナへ切り替え。
15:46 中利得アンテナへ切り替え。
18:37 再び低利得アンテナへ。
22:36 地上からの電波に同期して送信した信号を、地上でも確認。
12月8日1:34 地球指向への姿勢変更開始。
7:17 地球指向モードに移行完了。
7:18 中利得アンテナでの通信確立。
8:08 高利得アンテナでの通信確立。
10:09 リプロデータの再生を開始。
第5部では、「あかつき」が金星周回軌道投入に向けて噴射を始めてから、軌道投入に失敗し、ようやく地上との通信が確立されるまでの戦いを、「あかつき」の側からの視点で振り返ります。
今回は、時系列で書いてみます。
X月X日 燃料の逆流を防ぐために設置されている逆止弁CV-Fが閉塞。(閉塞の時期や原因は調査中)

12月5日6:10 金星周回軌道投入(VOI-1)のための地上からのコマンドを受信。
12月6日7:50 軌道制御エンジン(OME)噴射姿勢に変更。高利得アンテナを地上に向けられないため、中利得アンテナでの通信に切り替え。
12月7日8:48:57 定常制御モードから軌道制御モードに切り替え、VOI-1制御開始。まず姿勢制御スラスタ(RCS)4基(AB1~4)によるセトリング開始。
8:49:00 セトリング終了。OME噴射開始。
OME噴射中の姿勢制御はRCSの噴射によって行われる。AB3の噴射が比較的多く行われ、8:50:00以降はAB2の噴射も比較的多くなっていた。AB2噴射とAB3噴射との組み合わせはY軸回転をさせる方向である。結果として姿勢は±2度の精度で安定しており、RCSは適切に機能していた。
OME噴射開始後、燃料及び酸化剤の消費によって、燃料タンクと酸化剤タンクの圧力は一度低下するが、調圧圧力によって一定に保たれる設計になっていた。しかし、燃料タンクの加圧を行う配管の途中にある逆止弁CV-Fが閉塞していたため、燃料タンクを加圧できず、その後も燃料タンク圧の低下が続いた。
さらに、燃料タンクの圧力低下は、燃料供給量の減少を招いた。酸化剤タンクの調圧は正常だったため、酸化剤供給量は一定だった。そのため両者の混合比は相対的に酸化剤過多の状態となり、OMEの推力は徐々に低下、その結果機体の加速度は徐々に低下していった。やがて、地上試験での想定を逸脱した条件での燃焼状態となる。
8:50:43 地食開始、通信中断。地食とは「あかつき」から見て、地球が金星の陰に入ることであり、地上との通信ができなくなる。これはもともと計画されていたことなので、VOI-1は全て自動シークエンスで行うことになっている。
8:51:32 燃料供給量不足が、突然のOME噴射方向異常を引き起こす。(原因は調査中だが、相対的な酸化剤過多による高温条件へのシフトや、燃料噴射によるフィルムクーリングの不良によって、スラスタやノズルに破損が生じた可能性、異常な条件での燃焼の結果、スロート後方後燃えや不安定燃焼、インジェクタ噴射方向異常の何れかを生じた可能性が検討中)OME噴射方向は通常-Z軸方向だが、噴射方向がやや-Y軸方向に向かって傾いたため、+Y軸方向に力が加わり、この結果+X軸方向の不整トルクが発生した。不整トルクにより機体はX軸を中心に回転を始めた。同時に燃焼の異常により加速度も急激に低下した。


主にX軸周りの(実際には+X軸から9度程+Y軸方向に傾いた軸を中心とした)回転を始めたため、姿勢を維持するため、AB3及びAB4を全力で噴射した。しかし、OME噴射方向異常による不整トルクの発生は3.5秒間続き、RCS噴射にも関わらず、この間に機体の角速度は増加し続けた。
8:51:33 X軸周りの姿勢異常判定指標の大きさがが5Nmを超えた。
8:51:35.5 OME噴射方向の異常は回復傾向を見せ、不整トルクは減少した。RCS噴射により、回転は徐々に減速していった。同時に加速度もやや回復し、安定した。
8:51:36.5 Y軸周りの回転は逆回転に転じ、徐々に元の位置に戻りつつあった。一方、X軸周りの回転は減速したものの、回転は続いていた。
8:51:38 X軸周りの姿勢異常判定指標は5秒間連続で5Nmを上回ったため、姿勢維持が不可能と判断し、軌道制御モードから姿勢維持モードに移行。これによりOMEの燃料及び酸化剤バルブは閉鎖され、OMEの燃焼が中断された。結果、OMEの噴射は計画の720秒間を大きく下回る158秒間しか行われず、減速が不十分だったため、金星周回軌道投入に失敗した。新たな軌道は金星軌道より内側を225日で公転する軌道に。姿勢制御もRCS噴射からリアクションホイール(RW)へと移行。この時点で探査機はX軸周りに11度、Y軸周りに5度傾いていた。
8:52:30 酸化剤タンクの圧力がステップ状に回復。一方、燃料タンクは逆止弁CV-Fが99%以上閉塞していたためヘリウムガスの流入が遅く、圧力の回復に時間がかかった。
8:55:15 姿勢維持モードからセーフホールドモードへ移行。探査機は太陽電池パドルを太陽に向けて、自らはX軸を中心とする回転を始めた。
9:12:03 地食終了。しかし、セーフホールドモードに入っていたこと、軌道投入失敗で予定の位置から探査機がずれていたこと、等によって通信が取れず。
9:15:15 通信系が中利得アンテナから低利得アンテナへ。
9:55 日陰帯に入り、電力供給はバッテリへと切り替わる。
10:26 地上では最初の「あかつき」からの電波をキャッチ。
11:01 中利得アンテナへ切り替え。
11:04 日陰帯を出て、太陽電池からの電力供給を再び受ける。
11:30 調圧圧力が低下して、燃料タンク圧と同じ値に収斂。以降、テレメトリデータに明らかな異常は見られない。
12:29 通信確立せず、低利得アンテナへ切り替え。
15:46 中利得アンテナへ切り替え。
18:37 再び低利得アンテナへ。
22:36 地上からの電波に同期して送信した信号を、地上でも確認。
12月8日1:34 地球指向への姿勢変更開始。
7:17 地球指向モードに移行完了。
7:18 中利得アンテナでの通信確立。
8:08 高利得アンテナでの通信確立。
10:09 リプロデータの再生を開始。






※コメント投稿者のブログIDはブログ作成者のみに通知されます