夜行バスに揺られてやってきました~花の東京、まだまだ寒いです~。
途中としちゃんと待ち合わせをして、いざ、芝浦工大のキャンパスに
午前中はサイズの計測や機能検査などで、試合は午後から開かれました

最初は、障害物走破マイクロメカニズム競技、最初の丸い所や、迷路状の壁は良いとしても最後の砂はいただけません、各ロボット共ギアのすきまに砂が入って、動けなくなる物が続出です。


この種目は競技の人数が多い上に、競技の後でいちいち砂をはいて清めなければいけないのですごく時間がかかります。
とっても時間がかかって、この競技の、有線部門と無線部門が終わって、
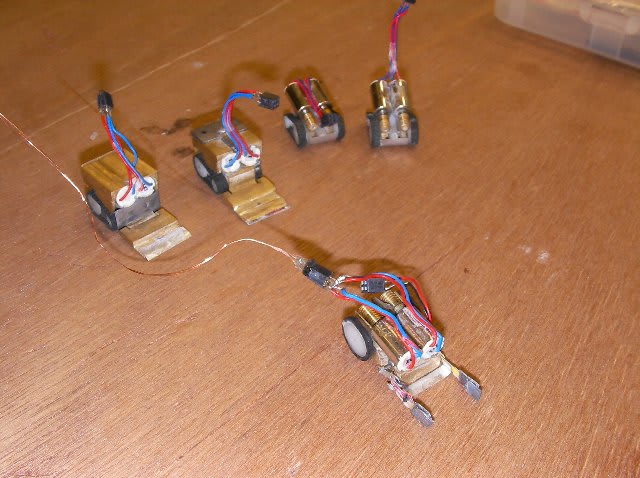
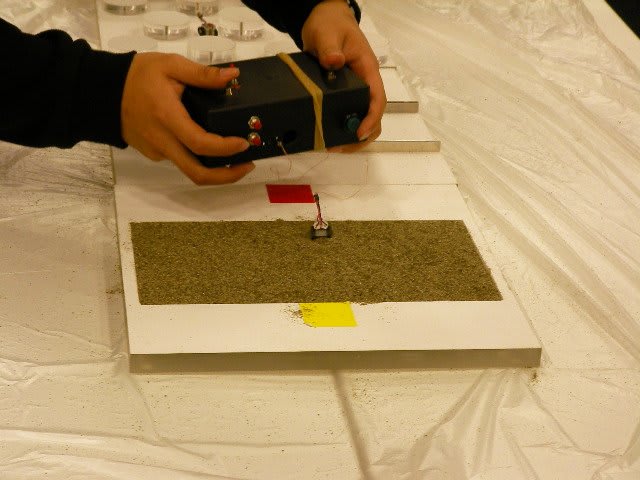
次はやっと相撲競技です、これは鍋敷きくらいのかわいい土俵で、押し合いをして落としたほうの勝ちです、
こんな小さな競技なので、もちろんテレビカメラで大きく拡大して写しているのですが、人手が足りないためか、前の2台のモニターには、全然関係ないものが写ったり、空を向いたままのカメラ映像が写ったりのどたばた振りです。
相撲の有線部門が終わった頃には、時間が無いので、相撲の無線部門と、作業メカの有線部門が同時進行となりました、
そうしているうちに、やっと作業メカの無線部門になりました。
日本人でのエントリーは私だけで、台湾の大学チームがほとんどです
時間が無いので、2分の持ち時間を1分に短縮だそうです。
その試合ですが、最初にサイコロを6個くらい一気に、ゴールに持って来たまでは良かったのですが、敵のあまりの速さに動揺して、アームを下ろしたままサイコロを取りに行ってしまい、上げたり下げたりしているうちに、60秒の時間はあっさり過ぎてしまい、大差で敗けてしまいました。
(そのなさけないビデオ)
あ~なさけないプレッシャーに弱い、!!(ビールでも引っ掛けてくるんだった)
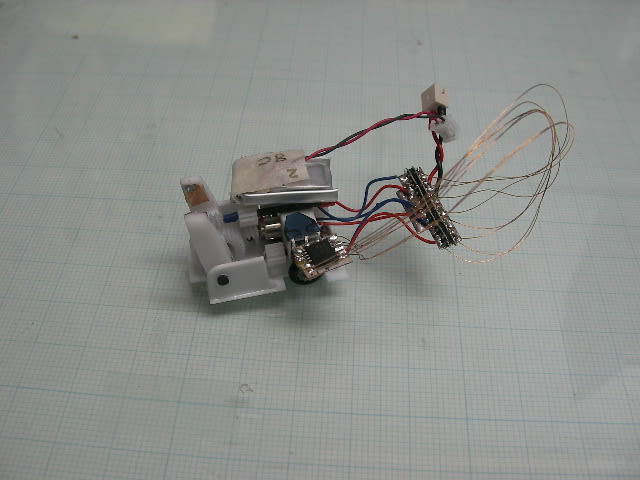
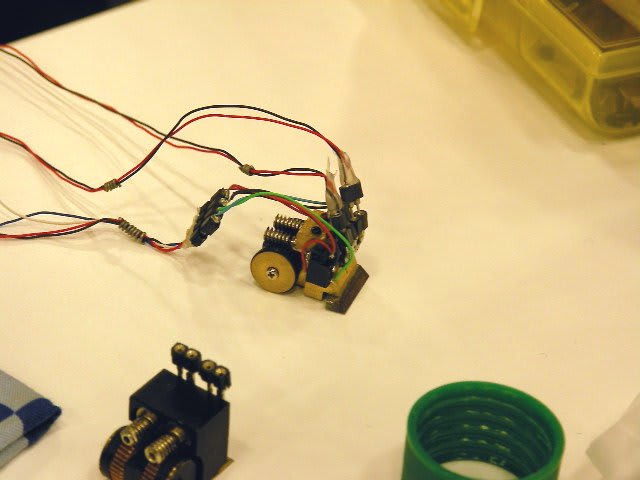
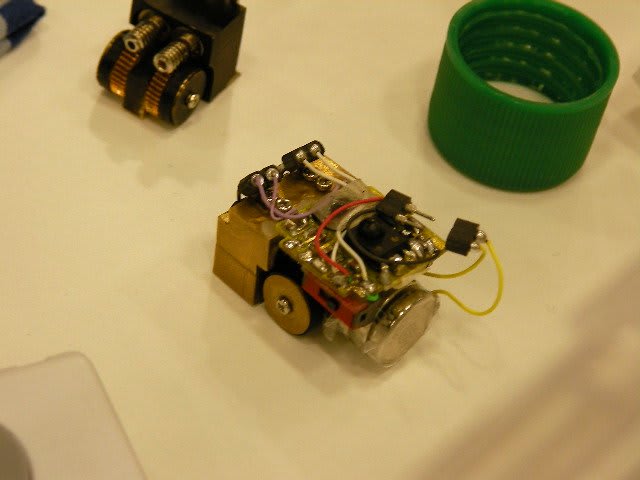
しかし、仮に最高に出来たとしても、敵の早さには到底かなうものではありませんでした。(上の写真のようなコの字型のアームをゴールへ走りながらピコピコと2回振り上げるだけでサイコロを反転してしまう、まったく無駄がない!!)

台湾の大学チームのできばえにすっかりやられてしまい、全種目外国勢が上位をしめてしまうという、不甲斐ない結果となってしまいました。
けれども唯一最後の、自慢のメカニズム種目で、例の0.88機を飛ばして最優秀賞をいただきました。
としちゃんのブログでも色々紹介してくれています。
頭を冷やして考えてみると、大会の2週間前に作り始めたのでは、到底無理でした、
台湾やタイのチームの真剣な開発力、練習に頭が下がります。
それにしても、我が日本の各チーム、大学から6チームほど専門学校2チーム人数では、外国勢とほぼ同数ですので、もっとがんばってほしかったです、
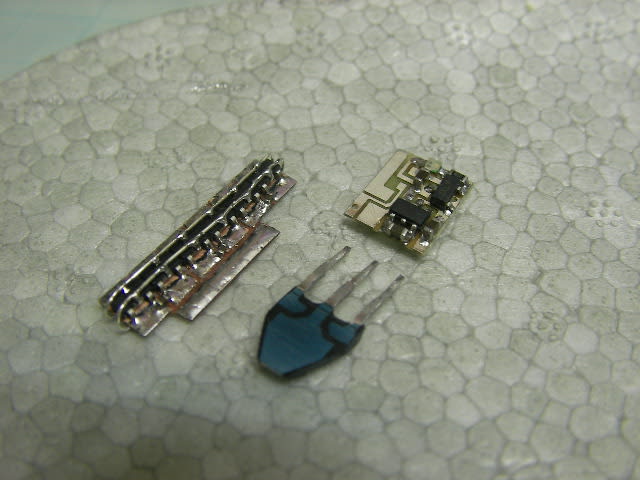
2年前からの情報がほとんどないと言うのも、新しく作る人には不利だったと思われ、特に日本勢は、無線のコントロールに小さなものが見当たらないのか、ほとんどちょろQの基板を使っていて、信号の混信もかなりあったように思われます。
それでも台湾チームはみんなが使っていない、900MHの電波を使っているところがすごい。(日本国内での使用は電波法的に微妙ですが)