








数台の機器からデータを送って、受信したデータをまとめて保存するようなものを作るため、
スケッチを書いてテストしています。続編
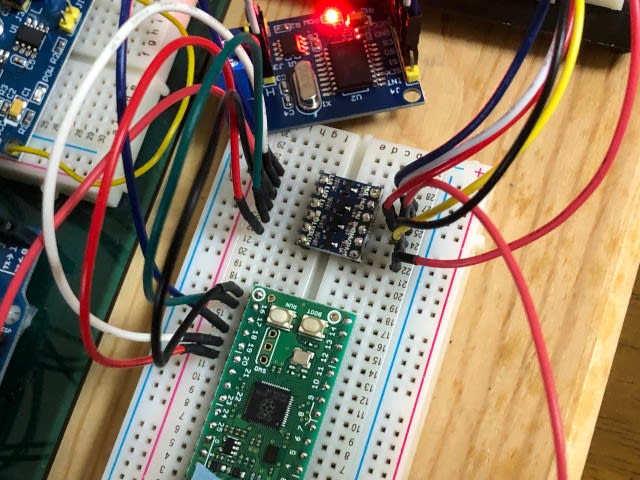
SPI接続CANバスモジュール(コントローラ:MCP2515、トランシーバ:TJA1050)と
送信AE-RP2040、受信AE-RP2040、送信Arduino-UNO 1台
millis()をそのまま送ってAE-RP2040で受信しています。
ライブラリがRP2040非対応か
ArduinoUNO、ESP32で動いていたライブラリがRP2040で動かない
Arduino IDEのライブラリマネージャでMCP2515を検索しAdafruit MCP2515をインストール
こちらは対応している(?)ようです。
送信データの1バイトに入る数値に制限がある?
0x00〜0xFF(B11111111)のはずが、最上位bitが使えず0x00〜0x7F(B1111111)となっています。
使い方に間違いがあるかもしれません。
送信8バイトをフルに使うことはないのでこれでも目的は
達成できそうです。
ChatGPT先生にいっぱいヒントを頂きました。
動作概要
複数のデータそれぞれにID番号を割り当てて
送信側:数値をばらしてバイト配列に入れて送る。
受信側:バイト配列を組み立ててもとの数値へ戻す。
準備できたら送信、受信スケッチを紹介したいと思います。

送信側スケッチ
変化する送信データサンプルとしてmillis()を読んで使っています。
3つのID(0x11,0x12,0x13)を使っています。
(0x14は使えなかった。0x21〜0x23使えた。)
ID毎に1つのデータを送っています。
/*Adafruit MCP2515_CAN_Sender Exampleを改変しています。
一部省略 転記ミスや表示されてない記号があるかも <は半角に直して*/
#include<Adafruit_MCP2515.h>
#define CS_PIN 20
// Set CAN bus baud rate
#define CAN_BAUDRATE (250000)
Adafruit_MCP2515 mcp(CS_PIN);
byte time0[8];
byte time1[8];
byte time2[8];
byte packetId0 = 0x11;
byte packetId1 = 0x12;
byte packetId2 = 0x13;//0x14は使えなかった
void setup() {
Serial.begin(115200);
while (!Serial);
delay(10);
Serial.println("MCP2515 Sender test!");
if (!mcp.begin(CAN_BAUDRATE)) {
Serial.println("Error initializing MCP2515.");
while (1);
delay(10);
}
Serial.println("MCP2515 chip found");
}
//送信側Sender(write)
void loop() {
// send packet: id is 11 bits, packet can contain up to 8 bytes of data
// パケットを送信:IDは11ビット、パケットには最大8バイトのデータを含むことができる
//Serial.print("Sending packet ... ");
uint32_t timeValue0 = millis();
uint32_t timeValue1 = millis();
uint32_t timeValue2 = millis();
Serial.print(packetId0 , HEX);
Serial.print(" send data ");
Serial.println(timeValue0);
Serial.print(packetId1, HEX);
Serial.print(" send data ");
Serial.println(timeValue1);
Serial.print(packetId2, HEX);
Serial.print(" send data ");
Serial.println(timeValue2);
mcp.beginPacket(packetId0);//送信側Sender(write)
for (int i = 0; i <= 7; i++) {//最上位bit使えない0x7F B1111111を超えるとNG
time0[i] = (byte)(timeValue0 >> (i * 7)) & 0x7F;
//time0[i] = (byte)(timeValue0 >> (i * 8)) & 0xFF;//最上位bitまで使える時
//sendData
mcp.write(time0[i]);
}
mcp.endPacket();
//送信側Sender(write)
mcp.beginPacket(packetId1);
for (int i = 0; i <= 7; i++) {//最上位bit使えない0x7F B1111111までOK
time1[i] = (byte)(timeValue1 >> (i * 7)) & 0x7F;//最上位bit使えないとき
//time1[i] = (byte)(timeValue1 >> (i * 8)) & 0xFF;//最上位bit使えるとき
//sendData
mcp.write(time1[i]);//送信側Sender(write)
}
mcp.endPacket();//送信側Sender(write)
//送信側Sender(write)
mcp.beginPacket(packetId2);
for (int i = 0; i <= 7; i++) {//最上位bit使えない0x7F B1111111までOK
time2[i] = (byte)(timeValue2 >> (i * 7)) & 0x7F;//最上位bit使えないとき
//time2[i] = (byte)(timeValue2 >> (i * 8)) & 0xFF;//最上位bit使えるとき
//sendData
mcp.write(time2[i]);//送信側Sender(write)
}
mcp.endPacket();//送信側Sender(write)
delay(1000);
}








※コメント投稿者のブログIDはブログ作成者のみに通知されます