









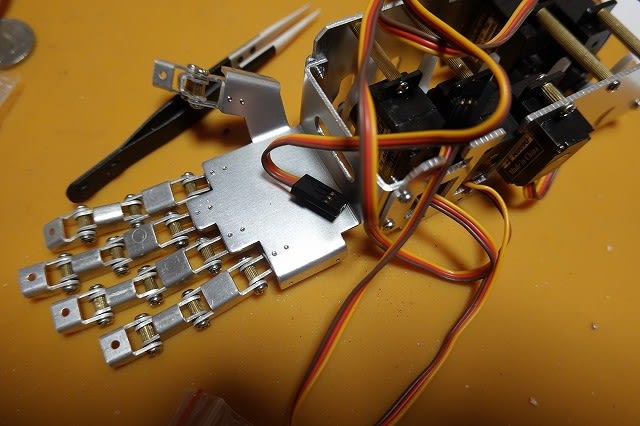
該出のロボットハンドの右手 親指の筋(タイラップだけど)、親指は短いし、RCサーボモータまでが近いので、引く力が大変です
筋が、シャーシに干渉してます。黒いタイラップの右側のアルミシャーシのとこ、いよいよ引くのが困難ぽいです

画の左が親指側、右側が干渉しているシャーシ

切り飛ばして、ヤスリで綺麗に なんとなく干渉が無くなりました。

筋を引くと、RCサーボモータが前に引かれるので、剛性が弱い 10mm厚のナットを挟みます

まんなかあたりの金色のが10mm厚農業ナット

もうちょっとで完成かな
該出のロボットハンドの右手 親指の筋(タイラップだけど)、親指は短いし、RCサーボモータまでが近いので、引く力が大変です
筋が、シャーシに干渉してます。黒いタイラップの右側のアルミシャーシのとこ、いよいよ引くのが困難ぽいです
画の左が親指側、右側が干渉しているシャーシ
切り飛ばして、ヤスリで綺麗に なんとなく干渉が無くなりました。
筋を引くと、RCサーボモータが前に引かれるので、剛性が弱い 10mm厚のナットを挟みます
まんなかあたりの金色のが10mm厚農業ナット
もうちょっとで完成かな
1月7日と10日UPの右手ですが、だいぶ出来ました。
組み立て説明の英語がわからないんじゃなく、説明がわからない 苦笑
ちなみに、説明書は添付されていません。南米大河販売のURLのとこか、世界網を泳いでいくと見つかります。
で、奥さん大変です。7日upに記載しました。タッピングビスと下穴問題。1.4mmのタッピングビスって記載してあったのですが、当方がチョイスしたのが、2mmのタッピングビス(ノギス持ち出したぜ) 英文の説明のタッピングビスは1.4MMのビスでした。普通のビスですよ!ビスですよ! どこがどう見たってタッピングじゃない。1φの穴に無理くりねじ込むという事らしいです。 お互い一勝一敗って事で (笑)
RCサーボモーターの取り付けに苦労しました。説明の読み違い、勘違い、スペーサーの寸法が指定のと若干づつ違うし! 選択するのが困難 おまけに、パーツが少しずつ余るので、正解がわからない RCサーボモーター取り付けるだけで何度もやりなおしました
手のひら側になります
あと少しです。 疲れた
空のお菓子箱かなにかの箱の中に置いて作業しないと、部品が小さいので、なくしてしまいそうです。
*追記
RCサーボモーターを取り付ける時は、スペーサの長さを計測し、長さ毎にまとめてからにしてね、説明書(英文)の一番目の指が、親指だよ(笑) 指毎に記載の先に記載してあるスペーサが、RCサーボモーターの後ろ側に延ばす方(たぶん)後に書いてあるのがモータ軸側に取り付ける方(たぶん)中指は、後ろに着けるんだよ(たぶん) 説明書の写真も参照にしてね(わかりずらいけど)
RCサーボモーターは、電源入ってない状態で軸フリーになってない様です。怖くてあまり力掛けられない!

1月7日UPの右手ですが、南米大陸の大河の方へぽちりましたら、もう届きました。
あ、そうそう⇒タイマー0の割り込みは、なんとなく出来る様になりました。

この程度の大きさ

右手って記載が、パッキングする人 怖かったのではと 笑

部品ごとにまとまっている感じです

RCサーボモーターも付属してました

さっそく、遠視(えんし ですよ 遠視)に鞭打って 組み立て始めました。

親指と、4本の指が出来上がり 一番下にほぼ1本分の部品が(スペーサみたいのが足りない)
奥さん大変です ⇒ 1.4mmだかのタッピングビス 下穴が小さすぎます。1本折ってしまいました。 号泣
下穴を開け直す必要があります。1.2mmくらいのドリル カインズ家にあるんだろうか?
号泣中です
これからカインズ家に行ってきますだぁ

南米販売店?で、右手を見つけてしまって 苦笑

これ組み立てキットらしいです(例によって説明がなんとなく親切じゃない!)
左手もあるようです。
で、これでジャンケンとかしたい(例ですよ例!)
RCサーボモーターなので、PIC16F88でコントロールできるんじゃねぇ ってことで、タイマー0での割り込みを検討中(まあ、例によってパクリって話も)感謝! 謝!
タイマー0で20mSの割り込みを作って、5本指分のパルスをポートAに出そうとというわけです。
なんとなく、割り込みが出来るようになりました。さて、右手を発注しますかね
*PIC16F84Aのアセンブラから移植ですので、軽く大変

http://mitt.la.coocan.jp/pic/pic5_17.html
のサイトを主に参考にさせていただきました。感謝 謝!
ぶっちゃけ、参考というより、ほぼ99.9% コピペにて 感謝 謝!
PIC16F88 に変更しています。
カーソル位置を少し右よりにして表示してます。
アセンブラです。
;LCD SC1602BS*B 接続 基本動作
;参考URL http://mitt.la.coocan.jp/pic/pic5_17.html
;まあ、ほぼまるコピーです 感謝 謝!
;**********************************************************
; clock:20MHz
;
; LCDを4ビットで制御
;
; PICのピン接続
; RB0 LCD DB4
; RB1 LCD DB5
; RB2 LCD DB6
; RB3 LCD DB7
;
; RA0 LCD R/W (6:Read/Write)
; RA1 LCD E (5:Enable Signal)
; RA2 LCD RS (4:Register Select)
;
; 使用タイマ(プログラムループ)
; 15mS LCDパワーオンリセット待ち
; 5mS LCD初期化ルーチン
; 1mS LCD初期化ルーチン
; 50uS LCD初期化ルーチン,書き込み待ち
;
list p=PIC16F88
INCLUDE "p16F88.inc"
__CONFIG _CONFIG1, _CP_OFF & _DEBUG_OFF & _CPD_OFF & _LVP_OFF & _BODEN_OFF & _MCLR_ON & _WDT_OFF & _PWRTE_ON & _HS_OSC
__CONFIG _CONFIG2, _IESO_OFF & _FCMEN_OFF
; __CONFIG _HS_OSC & _WDT_OFF & _PWRTE_ON & _CP_OFF
ORG 00h
;******
CBLOCK 20h
save_st ;STATUSのセーブ
save_w ;W-regのセーブ
CNT15mS ;15mSカウンタ
CNT5mS ;5mSカウンタ
CNT1mS ;1mSカウンタ
CNT50uS ;50μSカウンタ
char ;LCD表示データ
ENDC
RW EQU 00h ;LCD R/W
E EQU 01h ;LCD Enable
RS EQU 02h ;LCD Register Select
BUSY EQU 03h ;BUSY FLAG (PORTB,3)
; ==================== 初期処理 =====================
org 0
init
BSF STATUS,RP0 ;■バンク1に切替え
CLRF ANSEL
MOVLW H'F8'
MOVWF TRISA ;RA0-2は出力
MOVLW H'F0'
MOVWF TRISB ;RB0-3は出力
BCF OPTION_REG,NOT_RBPU
BCF STATUS,RP0 ;■バンク0に切替え
CLRF PORTA
CLRF PORTB
;***************************************************
goto start
;タイマチェック
TIM
BCF PORTA,0
CALL TIM1
BSF PORTA,0
CALL TIM1
GOTO TIM
TIM1
CALL wait50us
; CALL wait1ms
; CALL wait5ms
RETURN
;***************************************************
start
CALL LCD_init ;LCD 初期化
; ==================== メイン処理 =====================
main
CALL LCD_home ;カーソルを1行目の先頭に
MOVLW 084h ;表示位置変更 80h+00h~
CALL LCD_command
MOVLW 'H'
CALL LCD_write
MOVLW 'e'
CALL LCD_write
MOVLW 'l'
CALL LCD_write
MOVLW 'l'
CALL LCD_write
MOVLW 'o'
CALL LCD_write
MOVLW ','
CALL LCD_write
CALL LCD_2line ;カーソルを2行目の先頭に
MOVLW 0CAh ;表示位置変更 80h+40h~
CALL LCD_command
MOVLW 'w'
CALL LCD_write
MOVLW 'o'
CALL LCD_write
MOVLW 'r'
CALL LCD_write
MOVLW 'l'
CALL LCD_write
MOVLW 'd'
CALL LCD_write
MOVLW '!'
CALL LCD_write
CLRF PORTA
CLRF PORTB
SLEEP
GOTO main
;================= LCD表示をクリアする ===================
LCD_clear
MOVLW 01h
CALL LCD_command
RETURN
;================= LCDのカーソル位置を先頭に戻す =========
LCD_home
MOVLW 02h
CALL LCD_command
RETURN
;================= LCDのカーソル位置を2行目の先頭に =====
LCD_2line
MOVLW 0C0h
CALL LCD_command
RETURN
;================= LCDのディスプレイをONにする =========
LCD_on
MOVLW 0Ch
CALL LCD_command
RETURN
;================= LCDのディスプレイとカーソルをONにする ==
LCD_on_cur
MOVLW 0Eh
CALL LCD_command
RETURN
;================= LCDのディスプレイをOFFにする =======
LCD_off
MOVLW 08h
CALL LCD_command
RETURN
;================= LCDにデータを送る =====================
LCD_write
MOVWF char
CALL LCD_BF_wait ;LCD busy 解除待ち
BCF PORTA,RW ;R/W=0(Write)
BSF PORTA,RS ;RS=1(Data)
MOVLW 0F0h ;PORTBの下位4ビットを
ANDWF PORTB,F ; クリア
SWAPF char,W ;上位
ANDLW 0Fh ;4ビットを
IORWF PORTB,F ;PORTB(3-0)にセット(PORTB(7-4)はそのまま)
BSF PORTA,E ;LCDにデータ書き込み
NOP
BCF PORTA,E
MOVLW 0F0h ;PORTBの下位4ビットを
ANDWF PORTB,F ; クリア
MOVF char,W ;下位
ANDLW 0Fh ;4ビットを
IORWF PORTB,F ;PORTB(3-0)にセット(PORTB(7-4)はそのまま)
BSF PORTA,E ;LCDにデータ書き込み
NOP
BCF PORTA,E
RETURN
;================= LCDにコマンドを送る ===================
LCD_command
MOVWF char
CALL LCD_BF_wait ;LCD busy 解除待ち
BCF PORTA,RW ;R/W=0(Write)
BCF PORTA,RS ;RS=0(Command)
MOVLW 0F0h ;PORTBの下位4ビットを
ANDWF PORTB,F ; クリア
SWAPF char,W ;上位
ANDLW 0Fh ;4ビットを
IORWF PORTB,F ;PORTB(3-0)にセット(PORTB(7-4)はそのまま)
BSF PORTA,E ;LCDにデータ書き込み
NOP
BCF PORTA,E
MOVLW 0F0h ;PORTBの下位4ビットを
ANDWF PORTB,F ; クリア
MOVF char,W ;下位
ANDLW 0Fh ;4ビットを
IORWF PORTB,F ;PORTB(3-0)にセット(PORTB(7-4)はそのまま)
BSF PORTA,E ;LCDにデータ書き込み
NOP
BCF PORTA,E
RETURN
;================= LCD Busy 解除待ち ========================
LCD_BF_wait
BCF PORTA,E
BCF PORTA,RS ;RS=0(Control)
BSF PORTA,RW ;R/W=1(Read) Busy Flag read
BSF STATUS,RP0 ;■バンク1に切替え
MOVLW 0FFh
MOVWF TRISB ;RB0-7は入力
BCF STATUS,RP0 ;■バンク0に切替え
BSF PORTA,E ;LCD上位4ビット読み込み
NOP
BTFSS PORTB,BUSY ;LCD Busy ?
GOTO LCD_BF_wait1 ; No
BCF PORTA,E
NOP
BSF PORTA,E ;LCD下位4ビット読み飛ばし
NOP
BCF PORTA,E
GOTO LCD_BF_wait
LCD_BF_wait1
BSF PORTA,E ;LCD下位4ビット読み飛ばし
NOP
BCF PORTA,E
BSF STATUS,RP0 ;■バンク1に切替え
MOVLW 0F0h ;RB0-3は出力
MOVWF TRISB
BCF STATUS,RP0 ;■バンク0に切替え
RETURN
;================= LCD初期化 ================================
LCD_init
CALL wait15ms ;15mS待つ
BCF PORTA,RW ;R/W=0
BCF PORTA,RS ;RS=0
BCF PORTA,E ;E=0
MOVLW 0F0h ;PORTBの上位4ビットを
ANDWF PORTB,W ;取り出す(変更しないように)
IORLW 03h ;下位4ビットに'3'をセット
MOVWF PORTB
BSF PORTA,E ;ファンクションセット(1回目)
NOP
BCF PORTA,E
CALL wait5ms ;5mS待つ
MOVLW 0F0h ;PORTBの上位4ビットを
ANDWF PORTB,W ;取り出す(変更しないように)
IORLW 03h ;下位4ビットに'3'をセット
MOVWF PORTB
BSF PORTA,E ;ファンクションセット(2回目)
NOP
BCF PORTA,E
CALL wait5ms ;5mS待つ
MOVLW 0F0h ;PORTBの上位4ビットを
ANDWF PORTB,W ;取り出す(変更しないように)
IORLW 03h ;下位4ビットに'3'をセット
MOVWF PORTB
BSF PORTA,E ;ファンクションセット(3回目)
NOP
BCF PORTA,E
CALL wait5ms ;5mS待つ
MOVLW 0F0h ;PORTBの上位4ビットを
ANDWF PORTB,W ;取り出す(変更しないように)
IORLW 02h ;4ビットモード
MOVWF PORTB ;に
BSF PORTA,E ;設定
NOP
BCF PORTA,E
CALL wait1ms ;1mS待つ
MOVLW 028h ;4ビットモード,2行表示,7ドット
CALL LCD_command
CALL LCD_off ;ディスプレイOFF
CALL LCD_clear ;LCDクリア
MOVLW 06h ;
CALL LCD_command ;カーソルモードセット (Increment)
CALL LCD_on ;ディスプレイON,カーソルOFF
RETURN
;================= 15mS WAIT ================================
wait15ms
MOVLW d'3'
MOVWF CNT15mS
wait15ms_loop
CALL wait5ms
DECFSZ CNT15mS,F
GOTO wait15ms_loop
RETURN
;================= 5mS WAIT =================================
wait5ms
MOVLW d'100'
MOVWF CNT5mS
wait5ms_loop
CALL wait50us
DECFSZ CNT5mS,F
GOTO wait5ms_loop
RETURN
;================= 1mS WAIT =================================
wait1ms
MOVLW d'20'
MOVWF CNT1mS
wait1ms_loop
CALL wait50us
DECFSZ CNT1mS,F
GOTO wait1ms_loop
RETURN
;================= 50μS WAIT ===============================
wait50us
; 1サイクル(4クロック):0.2μS
; 50μS=0.2μS×250サイクル
MOVLW d'82' ;1
MOVWF CNT50uS ;1
wait50us_loop
DECFSZ CNT50uS,F ;1
GOTO wait50us_loop ;2
RETURN ;2+1
END
http://mitt.la.coocan.jp/pic/pic5_17.html
のサイトを主に参考にさせていただきました。感謝 謝!
ぶっちゃけ、参考というより、ほぼ99.9% コピペにて 感謝 謝!
PIC16F88 に変更しています。
カーソル位置を少し右よりにして表示してます。
あいかわらずのブレッドボード

LCD表示

何か表示をかんがえましょうか?

キーボード送出データ のタイトル(たぶん)でUPしていたやつ。やっとカッテングマシンがWIN7で動作可能となったので、古いカッティングマシンだからWIN7も動作保障してない、なぜかUSBドライブを認識しなく。何度も何度もトライて、なぜか認識できた 不思議!
ぐちゃぐちゃ貼ることも考えたのですが。あっさりと、型番?名前?だけ
ASCII MACINE としました。 どこかの雑誌名じゃないよ! 文字を送出するので ASCII MACINE
自宅で、打ち合わせ会議(飲み会じゃないよ)をしたので、無線に興味ない人たちでしたが、無理くりデモして初お披露目!

キー位置との対応は、用紙を作成して、パウチっこ!
表キー

裏キー


さっそく修正です。説明は、該出もね
PIC16F88のカテゴリーの方へUP
PIC16F84Aによる、キーボードからの10文字分を記憶し、送出する方です。
これで、IC-7851単体(単体か?)でRTTY(PSK)通信が楽に出来ます
無駄なとこもあります。
実際に使用したら、少し改善が必要ってことで
必ず10文字になって(10文字以下の場合は、スペースを送出)、スペースが多くなってみっともない
送出キー Eキー を押す(PA3=0)ことで記憶をストップさせていたので、使い勝ってが悪い
そこで、Fキーを押して(PA2=0)記憶開始した場合に、スペースキーで記憶を中止するように修正
文字列にスペースがあると、そこで、送出も終了としました。
お約束:参考にすれば~! 結果の責任は、僕にないからね~!
以下です
;2018年6月21日使い勝ってを改善のために修正
;10文字以下の記憶で、文字数までとする
;PA2=”0”で読込開始で、読込中(5文字以降)に再度PA2=”0”で読込終了
;現在のPA2=”0”の複数押しで止まってしまうのを改善する
;*6月 のマークが今回の改善のとこ
;PS2バッファ めざせIC-7851接続
;あるPS2ケーブル 茶:5V 赤:DATA 黄:CLK 灰:0V
;PA0="1"電源表示LED 出力
;PA1="0"書出中LED 出力
;PA2="0"読込SW 入力
;PA3="0"書出SW 入力
;PA4="0"外部のPICが書出中 入力 PA4="0"の時、PA1="0"にして何もしない
;PB0 未使用
;PB1 /DATA 出力
;PB2 /CLK 出力
;PB3="0"読込中LED 出力
;PB4 DATA 入力
;PB5 CLK、キーボード側電源確認 入力
list p=16F84
INCLUDE "p16F84A.inc"
__CONFIG _HS_OSC & _WDT_OFF & _PWRTE_ON & _CP_OFF
ORG 00h
;******
T1 EQU 0Ch
T2 EQU T1+1
T3 EQU T2+1
T4 EQU T3+1
T5 EQU T4+1
T6 EQU T5+1
MMA EQU T6+1
MMB EQU MMA+1
MMC EQU MMB+1
MM0 EQU MMC+1
MM1 EQU MM0+1
MM2 EQU MM1+1
MM3 EQU MM2+1
MM4 EQU MM3+1
MM5 EQU MM4+1
MM6 EQU MM5+1
MM7 EQU MM6+1
MM8 EQU MM7+1
MM9 EQU MM8+1
;********************************
BSF STATUS, RP0
MOVLW B'00011100'
MOVWF TRISA
MOVLW B'11110000'
MOVWF TRISB
BCF OPTION_REG,NOT_RBPU
BCF STATUS, RP0
;*****************************************
;タイマ調整、サブルーチン確認用
; CALL ALN
; GOTO MMTX
; GOTO INT ;スタートへ
; GOTO CHKTIM100M ;T5=H'EB'で100mS
; GOTO CHKTIM99 ;1.56mS用
; CALL TX_HF0 ;F0送出
; GOTO $-1 ;F0送出
; GOTO CHKTIMSET ;2.6uS/130mS
; GOTO CHKTIM01 ;NOP 3個で1.5uS
; GOTO CHKTIM40 ;T3=H'1D'で39uS
;
;
;CHKTIMSET
; BSF PORTB,1
; CALL TIMSET
; BCF PORTB,1
; CALL TIMSET
; GOTO CHKTIMSET
;CHKTIM01
; BSF PORTB,3
; CALL TIM01
; BCF PORTB,3
; CALL TIM01
; GOTO CHKTIM01
;CHKTIM40
; BSF PORTB,3
; CALL TIM40
; BCF PORTB,3
; CALL TIM40
; GOTO CHKTIM40
;CHKTIM100M
; BSF PORTB,3
; CALL TIM100M
; BCF PORTB,3
; CALL TIM100M
; GOTO CHKTIM100M
;CHKTIM99
; BSF PORTB,3
; CALL TIM99
; BCF PORTB,3
; CALL TIM99
; GOTO CHKTIM99
;*****************************************
;*****************************************
INT
;初期セット
MOVLW B'0011110'
MOVWF PORTA
MOVLW B'00001000'
MOVWF PORTB
CALL ALN
; GOTO MMTX ;確認用
;*****************************
;PS/2電源確認と初期ASK待ち
;PA4=”1”待ちと1秒待ち
BTFSS PORTB,5
GOTO $-1
MOVLW H'0F' ;3秒くらいウエイト
MOVWF T1
INTT1
BCF PORTA,0 ;点滅中は、ウエイト
CALL TIM100M
BSF PORTA,0
CALL TIM100M
DECFSZ T1,1
GOTO INTT1
BSF PORTA,0
; GOTO $-1 ;確認用
;*********************************
START
BTFSS PORTA,4
GOTO EXTPIC
BSF PORTA,1 ;書出LED消灯
START1
BTFSS PORTA,2 ;0で読込
GOTO MMREED
BTFSS PORTA,3 ;0で書出し
GOTO MMTX
GOTO START
EXTPIC ;外部のPICが書出中 入力 PA4="0"の時、PA1="0"にして何もしない
BCF PORTA,1
GOTO START
;******************************************
;読込スタート
MMREED
CALL TIM100M ;*6月
; MOVLW D'01' ;*6月
; MOVWF MMC ;*6月
BCF PORTB,3 ;読込LED点灯
CALL MRR
BTFSS PORTA,3
GOTO MMEND ;書出しへ
BTFSC PORTB,4
GOTO $-3
;MM0
MM0SET
CALL MRX
MOVF MMA,W
MOVWF MM0
;スペース"29"判定*6月
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO MMEND2
;書出確認とタイマ
CALL TIM99
BTFSS PORTB,5
GOTO $-1
BTFSS PORTA,3
GOTO MMEND ;書出しへ
BTFSC PORTB,4
GOTO $-3
;MM1
MM1SET
; INCF MMC,1 ;*6月
CALL MRX
MOVF MMA,W
MOVWF MM1
;スペース"29"判定*6月
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO MMEND2
;書出確認とタイマ
CALL TIM99
BTFSS PORTB,5
GOTO $-1
BTFSS PORTA,3
GOTO MMEND ;書出しへ
BTFSC PORTB,4
GOTO $-3
;MM2
MM2SET
; INCF MMC,1 ;*6月
CALL MRX
MOVF MMA,W
MOVWF MM2
;スペース"29"判定*6月
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO MMEND2
;書出確認とタイマ
CALL TIM99
BTFSS PORTB,5
GOTO $-1
BTFSS PORTA,3
GOTO MMEND ;書出しへ
BTFSC PORTB,4
GOTO $-3
;MM3
MM3SET
; INCF MMC,1 ;*6月
CALL MRX
MOVF MMA,W
MOVWF MM3
;スペース"29"判定*6月
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO MMEND2
;書出確認とタイマ
CALL TIM99
BTFSS PORTB,5
GOTO $-1
BTFSS PORTA,3
GOTO MMEND ;書出しへ
BTFSC PORTB,4
GOTO $-3
;MM4
MM4SET
; INCF MMC,1 ;*6月
CALL MRX
MOVF MMA,W
MOVWF MM4
;スペース"29"判定*6月
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO MMEND2
;書出確認とタイマ
CALL TIM99
BTFSS PORTB,5
GOTO $-1
BTFSS PORTA,3
GOTO MMEND ;書出しへ
BTFSC PORTB,4
GOTO $-3
;MM5
MM5SET
; INCF MMC,1 ;*6月
CALL MRX
MOVF MMA,W
MOVWF MM5
;スペース"29"判定*6月
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO MMEND2
;書出確認とタイマ
CALL TIM99
BTFSS PORTB,5
GOTO $-1
BTFSS PORTA,3
GOTO MMEND ;書出しへ
BTFSC PORTB,4
GOTO $-3
;MM6
MM6SET
; INCF MMC,1 ;*6月
CALL MRX
MOVF MMA,W
MOVWF MM6
;スペース"29"判定*6月
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO MMEND2
;書出確認とタイマ
CALL TIM99
BTFSS PORTB,5
GOTO $-1
BTFSS PORTA,3
GOTO MMEND ;書出しへ
BTFSC PORTB,4
GOTO $-3
;MM7
MM7SET
; INCF MMC,1 ;*6月
CALL MRX
MOVF MMA,W
MOVWF MM7
;スペース"29"判定*6月
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO MMEND2
;書出確認とタイマ
CALL TIM99
BTFSS PORTB,5
GOTO $-1
BTFSS PORTA,3
GOTO MMEND ;書出しへ
BTFSC PORTB,4
GOTO $-3
;MM8
MM8SET
; INCF MMC,1 ;*6月
CALL MRX
MOVF MMA,W
MOVWF MM8
;スペース"29"判定*6月
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO MMEND2
;書出確認とタイマ
CALL TIM99
BTFSS PORTB,5
GOTO $-1
BTFSS PORTA,3
GOTO MMEND ;書出しへ
BTFSC PORTB,4
GOTO $-3
;MM9
MM9SET
; INCF MMC,1 ;*6月
CALL MRX
MOVF MMA,W
MOVWF MM9
;書出確認とタイマ
CALL TIM99
BTFSS PORTB,5
GOTO $-1
BTFSS PORTA,3
GOTO MMEND ;書出しへ
BTFSC PORTB,4
GOTO $-3
;書出10桁終了
MMEND2 ;*6月
CALL TIM100M0
BSF PORTB,3 ;LED消灯
GOTO START
MMEND
CALL TIM100M0
BSF PORTB,3 ;LED消灯
GOTO MMTX
;**********************************
;PS2読み込み データ ⇒ MMAへ保存 0?6bitへコード、7bitへチェックサム
MRX
;スタート
CLRF MMA
BTFSC PORTB,5 ;CLK='1'確認
GOTO $-1
; CALL TIM01
; BTFSC PORTB,4 ;DATA=スタートビット確認
; GOTO MRX
BTFSS PORTB,5
GOTO $-1
CALL TIM01
;ビット0
BTFSC PORTB,5
GOTO $-1
CALL TIM01
BTFSC PORTB,4
BSF MMA,0
CALL TIM01
BTFSS PORTB,5
GOTO $-1
CALL TIM01
;ビット1
BTFSC PORTB,5
GOTO $-1
; CALL TIM01
BTFSC PORTB,4
BSF MMA,1
; CALL TIM01
BTFSS PORTB,5
GOTO $-1
; CALL TIM01
;ビット2
BTFSC PORTB,5
GOTO $-1
; CALL TIM01
BTFSC PORTB,4
BSF MMA,2
; CALL TIM01
BTFSS PORTB,5
GOTO $-1
; CALL TIM01
;ビット3
BTFSC PORTB,5
GOTO $-1
; CALL TIM01
BTFSC PORTB,4
BSF MMA,3
; CALL TIM01
BTFSS PORTB,5
GOTO $-1
; CALL TIM01
;ビット4
BTFSC PORTB,5
GOTO $-1
; CALL TIM01
BTFSC PORTB,4
BSF MMA,4
; CALL TIM01
BTFSS PORTB,5
GOTO $-1
; CALL TIM01
;ビット5
BTFSC PORTB,5
GOTO $-1
; CALL TIM01
BTFSC PORTB,4
BSF MMA,5
; CALL TIM01
BTFSS PORTB,5
GOTO $-1
; CALL TIM01
;ビット6
BTFSC PORTB,5
GOTO $-1
; CALL TIM01
BTFSC PORTB,4
BSF MMA,6
; CALL TIM01
BTFSS PORTB,5
GOTO $-1
; CALL TIM01
;ビット7 データは捨てる
BTFSC PORTB,5
GOTO $-1
CALL TIM01
; CALL TIM01
; CALL TIM01
; CALL TIM01
BTFSS PORTB,5
GOTO $-1
; CALL TIM01
;ビット8 チェックサム bit7へセットする
BTFSC PORTB,5
GOTO $-1
; CALL TIM01
BTFSC PORTB,4
BSF MMA,7
; CALL TIM01
CALL TIM100M
CALL TIM100M
RETURN
;***********************************
;メモリリセット
MRR
; CLRF MMA ;データ変換用;*6月
MOVLW H'29' ;スペースコード
MOVWF MMA ;*6月
MOVWF MM0 ;0?6bitへコード、7bitへチェックサム
MOVWF MM1
MOVWF MM2
MOVWF MM3
MOVWF MM4
MOVWF MM5
MOVWF MM6
MOVWF MM7
MOVWF MM8
MOVWF MM9
RETURN
;***********************************
;書出 スタートbit データ0?6bit 7bitは”0” チェックサム エンドビット
MMTX
;*********************************
;書出し確認用
; BTFSS PORTA,3
; GOTO $-1
; BTFSC PORTA,3
; GOTO $-1
;*********************************
BTFSS PORTB,4
GOTO $-1
BCF PORTA,1 ;書出LED点灯
CALL TIM100M0
;MM0
MOVF MM0,W
MOVWF MMA
MOVWF MMB
CALL MMTX1
;キーを離す
CALL TX_HF0
MOVF MM0,W
MOVWF MMA
CALL MMTX1
;スペース"29"判定*6月
MOVF MMB,W
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO START
;*********************************
;MM1
MOVF MM1,W
MOVWF MMA
MOVWF MMB
CALL MMTX1
; CALL TIM100M
;キーを離す
CALL TX_HF0
MOVF MM1,W
MOVWF MMA
CALL MMTX1
; CALL TIM100M
;スペース"29"判定*6月
MOVF MMB,W
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO START
;MM2
MOVF MM2,W
MOVWF MMA
MOVWF MMB
CALL MMTX1
; CALL TIM100M
;キーを離す
CALL TX_HF0
MOVF MM2,W
MOVWF MMA
CALL MMTX1
; CALL TIM100M
;スペース"29"判定*6月
MOVF MMB,W
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO START
;MM3
MOVF MM3,W
MOVWF MMA
MOVWF MMB
CALL MMTX1
; CALL TIM100M
;キーを離す
CALL TX_HF0
MOVF MM3,W
MOVWF MMA
CALL MMTX1
; CALL TIM100M
;スペース"29"判定*6月
MOVF MMB,W
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO START
;MM4
MOVF MM4,W
MOVWF MMA
MOVWF MMB
CALL MMTX1
; CALL TIM100M
;キーを離す
CALL TX_HF0
MOVF MM4,W
MOVWF MMA
CALL MMTX1
; CALL TIM100M
;スペース"29"判定*6月
MOVF MMB,W
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO START
;MM5
MOVF MM5,W
MOVWF MMA
MOVWF MMB
CALL MMTX1
; CALL TIM100M
;キーを離す
CALL TX_HF0
MOVF MM5,W
MOVWF MMA
CALL MMTX1
; CALL TIM100M
;スペース"29"判定*6月
MOVF MMB,W
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO START
;MM6
MOVF MM6,W
MOVWF MMA
MOVWF MMB
CALL MMTX1
; CALL TIM100M
;キーを離す
CALL TX_HF0
MOVF MM6,W
MOVWF MMA
CALL MMTX1
; CALL TIM100M
;スペース"29"判定*6月
MOVF MMB,W
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO START
;MM7
MOVF MM7,W
MOVWF MMA
MOVWF MMB
CALL MMTX1
; CALL TIM100M
;キーを離す
CALL TX_HF0
MOVF MM7,W
MOVWF MMA
CALL MMTX1
; CALL TIM100M
;スペース"29"判定*6月
MOVF MMB,W
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO START
;MM8
MOVF MM8,W
MOVWF MMA
MOVWF MMB
CALL MMTX1
; CALL TIM100M
;キーを離す
CALL TX_HF0
MOVF MM8,W
MOVWF MMA
CALL MMTX1
; CALL TIM100M
;スペース"29"判定*6月
MOVF MMB,W
MOVF MMA
SUBLW H'2A'
MOVWF MMB
DECFSZ MMB,1
GOTO $+2
GOTO START
;MM9
MOVF MM9,W
MOVWF MMA
CALL MMTX1
; CALL TIM100M
;キーを離す
CALL TX_HF0
MOVF MM9,W
MOVWF MMA
CALL MMTX1
; CALL TIM100M
;スペースキーデータ送出
MOVLW H'29'
MOVWF MMA
CALL MMTX1
;キーを離す
CALL TX_HF0
MOVLW H'29'
MOVWF MMA
CALL MMTX1
BCF PORTB,1
CALL TIM100M0
BSF PORTA,1 ;書出LED消灯
; GOTO MMTX ;デバッグ書き出し確認用
GOTO START
;**********************************
;書出サブルーチン 逆動作だよ 0が1 PB1=/DATA PB2=/CLK
MMTX1
;***************************************
;CLK=0を確認
BTFSS PORTB,5
GOTO $-1
;***************************************
;スタートビット ”0”
BSF PORTB,1
CALL TIM19
BSF PORTB,2
CALL TIM40
;0bit
BCF PORTB,2
BCF PORTB,1
BTFSS MMA,0
BSF PORTB,1
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit1
BCF PORTB,1
BTFSS MMA,1
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit2
BCF PORTB,1
BTFSS MMA,2
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit3
BCF PORTB,1
BTFSS MMA,3
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit4
BCF PORTB,1
BTFSS MMA,4
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit5
BCF PORTB,1
BTFSS MMA,5
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit6
BCF PORTB,1
BTFSS MMA,6
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit7 "0"
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit8 チェツクサム
BCF PORTB,1
BTFSS MMA,7
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit9 ストップビット ”1”
BCF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
BCF PORTB,2
CALL TIM99
CALL TIM99
CALL TIM99
RETURN
;************************************
;キーを離したときのF0の送出
TX_HF0
;***************************************
;CLK=0を確認
BTFSS PORTB,5
GOTO $-1
;***************************************
;スタートビット ”0”
BSF PORTB,1
CALL TIM19
BSF PORTB,2
CALL TIM40
;0bit =”0”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit1 =”0”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit2 =”0”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit3 =”0”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit4 =”1”
BCF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit5 =”1”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit6 =”1”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit7 =”1”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit8 チェツクサム =”1”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit9 ストップビット ”1”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
BCF PORTB,2
CALL TIM99
RETURN
;***********************************
ALN
CLRF MMA ;データ変換用
MOVLW H'1C' ;A
MOVWF MM0
MOVLW H'32' ;B
MOVWF MM1
MOVLW H'A1' ;C
MOVWF MM2;
MOVLW H'23' ;D
MOVWF MM3
MOVLW H'A4' ;E
MOVWF MM4
MOVLW H'AB' ;F
MOVWF MM5
MOVLW H'34' ;G
MOVWF MM6
MOVLW H'B3' ;H
MOVWF MM7
MOVLW H'43' ;I
MOVWF MM8
MOVLW H'3B' ;J
MOVWF MM9
RETURN
;*************************************
;クロック判定時のタイマ とりあえず
TIM01
NOP
NOP
NOP
RETURN
;********************
;書出確認用タイマ
TIMSET
MOVLW H'69'
MOVWF T6
LOOPSET
BTFSS PORTA,3
GOTO T6END
DECFSZ T6,1
GOTO LOOPSET1
GOTO TIMSETEND
LOOPSET1
CALL TIM99
GOTO LOOPSET
T6END
MOVLW H'01'
MOVWF T6
TIMSETEND
RETURN
TIM99 ;1.56mS用
MOVLW H'B'
MOVWF T5
TIM991
CALL TIM100M2
DECFSZ T5,1
GOTO TIM991
RETURN
;*******************************
;タイマ100mS
TIM100M
CALL TIM100M0
CALL TIM100M0
CALL TIM100M0
RETURN
TIM100M0
MOVLW H'EB'
MOVWF T5
TIM100M1
CALL TIM100M2
DECFSZ T5,1
GOTO TIM100M1
RETURN
TIM100M2
MOVLW H'EB' ;1.56mS用
MOVWF T4
TIM100M3
DECFSZ T4,1
GOTO TIM100M3
RETURN
;********************************
;20μSタイマ 1/2周期
TIM40
CALL TIM19
CALL TIM19
RETURN
;19μSタイマ 1/4周期
TIM19
MOVLW H'1E'
MOVWF T3
LOOPTIM19
DECFSZ T3,1
GOTO LOOPTIM19
RETURN
;**********************************
END
コールサイン等のデータを削除してあるので、このままでは動作しません。良く見て変更してください
もっと賢い方法はあると思います。
電源投入時に3秒くらいウエイト状態にして、その間にPS/2キーボードが勝手に初期プロトコルやれば~的な
あと、自分が送出しているときは、他のPICは、黙らせています。
あとちこちタイマで逃げてます。またデバッグ中に試にタイマを入れているのがそのままです。(動作するからいいやってことで)
お約束:参考にすれば~! 結果の責任は、僕にないからね~!
今回は、長いぞーーーーーーーーーーー!
ということで分割 その2です
追記 キーを離したときの動作で F0、キーコード を送出してますが、F0を別に作ってます。(元のを転用したから)、1文字送出のサブルーチンでF0を送出した方が、多少なりとも見栄えがよくなったかも アセンブラを読みこなせばわかるかも
;******************************************************
;*****************************************************
;裏キーボードの表配列
;スペース先頭なら CALL TX_SP CALL M001_TX CALL M002_TX
;一文字送出なら CALL M001_TX
;文字列だけなら CALL M001_TX CALL M002_TX
;長文なら CALL M001_TX CALL M002_TX CALL M001_TX CALL M002_TX
;*****************************************************
;スタート キーマトリックススキャン
START
MOVLW B'11101001'
MOVWF PORTB
START_CHK
; BSF PORTB,3
BTFSC PORTA,4 ;裏キー配列 BTFSC にする 表はBTFSSにする
GOTO START
BTFSC PORTB,4
GOTO START_1 ;基本のPICが書出中?
MOVLW B'10101001'
MOVWF PORTB
CALL TIM100M
CALL TIM100M
GOTO START_CHK
START_1
MOVLW B'11101001'
MOVWF PORTB
CALL TIM99
MOVLW B'11101000'
MOVWF PORTB
;*********************************************************
;マトリックスキー検出 シフトが使えないぞぉ!
;0列目 キー表示1,4,7,0
CALL TIM99
BTFSS PORTA,0
GOTO K01 ;1キー
CALL TIM99
BTFSS PORTA,1
GOTO K02 ;4キー
CALL TIM99
BTFSS PORTA,2
GOTO K03 ;7キー
CALL TIM99
BTFSS PORTA,3
GOTO K04 ;0キー
CALL TIM99
CALL TIM99
MOVLW B'11101001'
MOVWF PORTB
CALL TIM99
;1列目 キー表示2,5,8,F
MOVLW B'11001001'
MOVWF PORTB
CALL TIM99
BTFSS PORTA,0
GOTO K11 ;2キー
BTFSS PORTA,1
GOTO K12 ;5キー
BTFSS PORTA,2
GOTO K13 ;8キー
BTFSS PORTA,3
GOTO GOODSTART ;Fキー 読込開始のSW
MOVLW B'11101001'
MOVWF PORTB
CALL TIM99
;2列目 キー表示3,6,9,E
MOVLW B'10101001'
MOVWF PORTB
CALL TIM99
BTFSS PORTA,0
GOTO K21 ;3キー
BTFSS PORTA,1
GOTO K22 ;6キー
BTFSS PORTA,2
GOTO K23 ;9キー
BTFSS PORTA,3
GOTO GOODSTART ;Eキー 書出開始のSW
MOVLW B'11101001'
MOVWF PORTB
CALL TIM99
;4列目 キー表示 A,B,C,D
MOVLW B'01101001'
MOVWF PORTB
CALL TIM99
BTFSS PORTA,0
GOTO K31 ;Aキー
BTFSS PORTA,1
GOTO K32 ;Bキー
BTFSS PORTA,2
GOTO K33 ;Cキー
BTFSS PORTA,3
GOTO F12OUT ;Dキー F12キー
GOTO START
;**********************************************
;**********************************************
;F12
F12OUT ;Dキー
BCF PORTB,3
CALL TIM99
MOVLW H'DA'
MOVWF MMA
CALL MMTX2
CALL TIM99
MOVLW H'07'
MOVWF MMA
CALL MMTX2
; RETURN
GOTO START
;*****************************
;読込書出開始
GOODSTART ;Eキー、Fキー
CALL TIM100M
CALL TIM100M
GOTO START
;******************************
;********************************************************************************
;::*****************************************************************************
;裏キーデータ
;****************************
;キーボードの表配列
;スペース先頭なら CALL TX_SP CALL M001_TX CALL M002_TX
;一文字送出なら CALL M001_TX
;文字列だけなら CALL M001_TX CALL M002_TX
;長文なら CALL M001_TX CALL M002_TX CALL M001_TX CALL M002_TX
;********************************************
;QRL QRL QRL DE J K
K01 ;1キー
BCF PORTB,3
CALL TIM99
CALL QRL
CALL M001_TX
CALL M002_TX
GOTO START
;******************************
;DE J UR RST599 599 QSL VIR BURO JARL QRA QTH -CITY TOKYO JCC
;RST_QRA_RIG
K02 ;4キー
BCF PORTB,3
CALL TIM99
CALL TX_SP
CALL RST_QRA_RIG
CALL M001_TX
CALL M002_TX
CALL TIM99
CALL TIM99
CALL RST_QRA_RIG_3
CALL M001_TX
CALL M002_TX
GOTO START
;**********************************
;***************************************************
;おはようございます
;MORNING
K03 ;7キー
BCF PORTB,3
CALL TIM99
CALL TX_SP
CALL MORNING
CALL M001_TX
CALL M002_TX
GOTO START
;**********************************
;CQ CQ CQ DE J J J QTH -CTY TOKYO JCC- PSE K
;CQCQ_QTH
K04 ;0キー
BCF PORTB,3
CALL TIM99
CALL CQCQ_QTH
CALL M001_TX
CALL M002_TX
GOTO START
;**********************************************
;*************************************************
;;UR RST599 599 QSL*
K11 ;2キー
BCF PORTB,3
CALL TIM99
CALL TX_SP
CALL UR599
CALL M001_TX
CALL M002_TX
CALL TIM99
GOTO START
;*************************************************
K12 ;5キー
; BCF PORTB,3
; CALL TIM99
; CALL TX_SP
; CALL EVNEING
; CALL M001_TX
; CALL M002_TX
GOTO START
;*************************************************
;こんにちは 昼間
;AFTERNOON
K13 ;8キー
BCF PORTB,3
CALL TIM99
CALL TX_SP
CALL AFTERNOON
CALL M001_TX
CALL M002_TX
GOTO START
;************************************************
;QTH -CTY TOKYO JCC- PSE K
;QTH
K21 ;3キー
BCF PORTB,3
CALL TIM99
CALL TX_SP
CALL QTH
CALL M001_TX
CALL M002_TX
GOTO START
;************************************************
;************************************************
K22 ;6キー
BCF PORTB,3
CALL TIM99
; CALL TX_SP
; CALL
; CALL M001_TX
; CALL M002_TX
GOTO START
;************************************************
;こんばんわ 夜間
K23 ;9キー
BCF PORTB,3
CALL TIM99
CALL TX_SP
CALL EVNEING
CALL OM_599
CALL M001_TX
CALL M002_TX
GOTO START
;************************************
;****************************************
;ありがとうございました
;arigatou
K31 ;Aキー
BCF PORTB,3
CALL TIM99
CALL TX_SP
CALL arigatou
CALL M001_TX
CALL M002_TX
GOTO START
;****************************************
K32 ;Bキー
BCF PORTB,3
CALL TIM99
; CALL
; CALL M001_TX
; CALL M002_TX
GOTO START
;****************************************
K33 ;Cキー
BCF PORTB,3
CALL TIM99
; CALL
; CALL M001_TX
; CALL M002_TX
GOTO START
;****************************************
;***********************************
;************************************************
;DE J K ;表裏共通
MOVLW H'23' ;D
MOVWF M001
MOVLW H'A4' ;E
MOVWF M002
MOVLW H'29' ;sp
MOVWF M003
MOVLW H'3B' ;J
MOVWF M004
MOVLW H'
MOVWF M005
MOVLW H'
MOVWF M006
MOVLW H'
MOVWF M007
MOVLW H'
MOVWF M008
MOVLW H'
MOVWF M009
MOVLW H'29' ;sp
MOVWF M010
;次はM011から
MOVLW H'CD' ;P
MOVWF M011
MOVLW H'9B' ;S
MOVWF M012
MOVLW H'A4' ;E
MOVWF M013
MOVLW H'29' ;sp
MOVWF M014
MOVLW H'C2' ;K
MOVWF M015
MOVLW D'05' ;END
MOVWF MM0
RETURN
;************************************************************************
;DE J UR RST599 599 QSL VIR BURO JARL QRA QTH -CITY TOKYO JCC
RST_QRA_RIG
;4キー
CALL RST599_2 ;次M026から
RST_QRA_RIG_2
MOVLW H'15' ;Q
MOVWF M026
MOVLW H'9B' ;S
MOVWF M027
MOVLW H'CB' ;L
MOVWF M028
MOVLW H'29' ;sp
MOVWF M029
MOVLW H'2A' ;V
MOVWF M030
MOVLW H'43' ;I
MOVWF M031
MOVLW H'AD' ;R
MOVWF M032
MOVLW H'29' ;sp
MOVWF M033
MOVLW H'3B' ;J
MOVWF M034
MOVLW H'1C' ;A
MOVWF M035
MOVLW H'AD' ;R
MOVWF M036
MOVLW H'CB' ;L
MOVWF M037
MOVLW H'29' ;sp
MOVWF M038
MOVLW H'15' ;Q
MOVWF M039
MOVLW H'AD' ;R
MOVWF M040
MOVLW H'1C' ;A
MOVWF M041
MOVLW H'29' ;sp
MOVWF M042
MOVLW H'
MOVWF M043
MOVLW H'
MOVWF M044
MOVLW H'
MOVWF M045
MOVLW H'
MOVWF M046
MOVLW H'
MOVWF M047
MOVLW H'29' ;sp
MOVWF M048
MOVLW H'15' ;Q
MOVWF M049
MOVLW H'2C' ;T
MOVWF M050
MOVLW H'B3' ;H
MOVWF M051
MOVLW H'29' ;sp
MOVWF M052
MOVLW H'
MOVWF M053
MOVLW H'
MOVWF M054
MOVLW H'
MOVWF M055
MOVLW H'CE' ;-
MOVWF M056
MOVLW H'A1' ;C
MOVWF M057
MOVLW H'43' ;i
MOVWF M058
MOVLW H'2C' ;T
MOVWF M059
MOVLW H'B5' ;Y
MOVWF M060
MOVLW H'29' ;sp
MOVWF M061
MOVLW H'2C' ;T
MOVWF M062
MOVLW H'C4' ;O
MOVWF M063
MOVLW H'C2' ;K
MOVWF M064
MOVLW H'B5' ;Y
MOVWF M065
MOVLW H'C4' ;O
MOVWF M066
MOVLW H'29' ;sp
MOVWF M067
MOVLW H'3B' ;J
MOVWF M068
MOVLW H'A1' ;C
MOVWF M069
MOVLW H'A1' ;C
MOVWF M070
MOVLW H'
MOVWF M071
MOVLW H'
MOVWF M072
MOVLW H'
MOVWF M073
MOVLW H'
MOVWF M074
MOVLW D'63' ;END ここがミソです
MOVWF MM0
RETURN
あとは、同様です(たぶん)考えて下さい
END
これで、IC-7851単体(単体か?)でRTTY(PSK)通信が楽に出来ます
無駄にタイマが入っているとこがあります。動作しているので削除する気がない!
MM0が文字数を管理してます。MM0=0で送出文字数が無しになるようにしてます
メモリ数を少しでも小さくする工夫はしています。
コールサイン等のデータを削除してあるので、このままでは動作しません。良く見て変更してください
もっと賢い方法はあると思います。
電源投入時に3秒くらいウエイト状態にして、その間にPS/2キーボードが勝手に初期プロトコルやれば~的な
あと、自分が送出しているときは、他のPICは、黙らせています。
あとちこちタイマで逃げてます
お約束:参考にすれば~! 結果の責任は、僕にないからね~!
今回は、長いぞーーーーーーーーーーー!
ということで分割 その1です
;長文の方 裏データ もとい 2個目のPIC16F88
;PS2 定型文の送出だぁ めざせIC-7851接続
;あるPS2ケーブル 茶:5V 赤:DATA 黄:CLK 灰:0V
;PA0?PA3 キー入力 4×4のマトリックスキー
;PA4 入力 キーの2面化
;PB0、PB5、PB6、PB7 マトリックスキーのスキャン 飛んでるけど許す!
;PB1 /DATA 出力
;PB2 /CLK 出力
;PB3="0"データ走出中
;PB4 /書出中 入力
list p=PIC16F88
INCLUDE "p16F88.inc"
__CONFIG _CONFIG1, _CP_OFF & _DEBUG_OFF & _CPD_OFF & _LVP_OFF & _BODEN_OFF & _MCLR_ON & _WDT_OFF & _PWRTE_ON & _EXTCLK
__CONFIG _CONFIG2, _IESO_OFF & _FCMEN_OFF
; __CONFIG _HS_OSC & _WDT_OFF & _PWRTE_ON & _CP_OFF
ORG 00h
;******
T1 EQU 20h
T2 EQU T1+1
T3 EQU T2+1
T4 EQU T3+1
T5 EQU T4+1
T6 EQU T5+1
MMA EQU T6+1
MMB EQU MMA+1
MM0 EQU MMB+1
;********************************
M000 EQU MM0+1
M001 EQU M000+1
M002 EQU M001+1
M003 EQU M002+1
M004 EQU M003+1
M005 EQU M004+1
M006 EQU M005+1
M007 EQU M006+1
M008 EQU M007+1
M009 EQU M008+1
M010 EQU M009+1
M011 EQU M010+1
M012 EQU M011+1
M013 EQU M012+1
M014 EQU M013+1
M015 EQU M014+1
M016 EQU M015+1
M017 EQU M016+1
M018 EQU M017+1
M019 EQU M018+1
M020 EQU M019+1
M021 EQU M020+1
M022 EQU M021+1
M023 EQU M022+1
M024 EQU M023+1
M025 EQU M024+1
M026 EQU M025+1
M027 EQU M026+1
M028 EQU M027+1
M029 EQU M028+1
M030 EQU M029+1
M031 EQU M030+1
M032 EQU M031+1
M033 EQU M032+1
M034 EQU M033+1
M035 EQU M034+1
M036 EQU M035+1
M037 EQU M036+1
M038 EQU M037+1
M039 EQU M038+1
M040 EQU M039+1
M041 EQU M040+1
M042 EQU M041+1
M043 EQU M042+1
M044 EQU M043+1
M045 EQU M044+1
M046 EQU M045+1
M047 EQU M046+1
M048 EQU M047+1
M049 EQU M048+1
M050 EQU M049+1
M051 EQU M050+1
M052 EQU M051+1
M053 EQU M052+1
M054 EQU M053+1
M055 EQU M054+1
M056 EQU M055+1
M057 EQU M056+1
M058 EQU M057+1
M059 EQU M058+1
M060 EQU M059+1
M061 EQU M060+1
M062 EQU M061+1
M063 EQU M062+1
M064 EQU M063+1
M065 EQU M064+1
M066 EQU M065+1
M067 EQU M066+1
M068 EQU M067+1
M069 EQU M068+1
M070 EQU M069+1
M071 EQU M070+1
M072 EQU M071+1
M073 EQU M072+1
M074 EQU M073+1
M075 EQU M074+1
M076 EQU M075+1
M077 EQU M076+1
M078 EQU M077+1
M079 EQU M078+1
M080 EQU M079+1
M081 EQU M080+1
M082 EQU M081+1
M083 EQU M082+1
M084 EQU M083+1
M085 EQU M084+1
M086 EQU M085+1
M087 EQU M086+1
M088 EQU M087+1
M089 EQU M088+1
;********************************
MOVLW B'11101001'
MOVWF PORTB
BSF STATUS, RP0
CLRF ANSEL
MOVLW B'01011111'
MOVWF TRISA
MOVLW B'00010000'
MOVWF TRISB
BCF OPTION_REG,NOT_RBPU
BCF STATUS, RP0
;*****************************************
;*****************************************
;*****************************************
INT
;4×4 16キーマトリックス
;PA0 ROW1
;PA1 ROW2
;PA3 ROW3
;PA4 ROW4
;PB0 COL1
;PB5 COL2
;PB6 COL3
;PB7 COL4
;初期セット
MOVLW B'11101001'
MOVWF PORTB
;*****************************
;PS/2電源確認と初期ASK待ち
;PA4=”1”待ちと1秒待ち
BTFSS PORTB,4
GOTO $-1
MOVLW H'0F' ;3秒くらいウエイト
MOVWF T1
INTT1
BCF PORTB,3 ;点滅中は、ウエイト
CALL TIM100M
BSF PORTB,3
CALL TIM100M
DECFSZ T1,1
GOTO INTT1
BSF PORTB,3
;*********************************
GOTO START
;********************************
;***********************************
;書出 スタートbit データ0?6bit 7bitは”0” チェックサム エンドビット
MMTX
;*********************************
;書出し確認用
; BTFSS PORTA,3
; GOTO $-1
; BTFSC PORTA,3
; GOTO $-1
;*********************************
;******************************
;スペース送出
;スペース先頭なら CALL TX_SP CALL M001_TX CALL M002_TX
;一文字送出なら CALL M001_TX
;文字列だけなら CALL M001_TX CALL M002_TX
;長文なら CALL M001_TX CALL M002_TX CALL M001_TX CALL M002_TX
TX_SP
; BTFSS PORTB,4
; GOTO $-1
; BCF PORTB,3 ;書出LED点灯
; CALL TIM100M0
;****************************************
MOVLW H'29'
MOVWF MMA
CALL MMTX2
RETURN
;******************************
;一文字送出
M001_TX
; BTFSS PORTB,4
; GOTO $-1
BCF PORTB,3 ;書出LED点灯
CALL TIM100M0
;********************************
MOVF M001,W
MOVWF MMA
CALL MMTX2
RETURN
;二文字以降の送出
M002_TX
; BTFSS PORTB,4
; GOTO $-1
BCF PORTB,3 ;書出LED点灯
CALL TIM100M0
;****************************
MOVF M002,W
MOVWF MMA
CALL MMTX2
;M003
MOVF M003,W
MOVWF MMA
CALL MMTX2
;M004
MOVF M004,W
MOVWF MMA
CALL MMTX2
;M005
MOVF M005,W
MOVWF MMA
CALL MMTX2
;M006
MOVF M006,W
MOVWF MMA
CALL MMTX2
;M007
MOVF M007,W
MOVWF MMA
CALL MMTX2
;M008
MOVF M008,W
MOVWF MMA
CALL MMTX2
;M009
MOVF M009,W
MOVWF MMA
CALL MMTX2
;M010
MOVF M010,W
MOVWF MMA
CALL MMTX2
;************************************
;ここからはENDを検出する
;M011
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M011,W
MOVWF MMA
CALL MMTX2
;M012
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M012,W
MOVWF MMA
CALL MMTX2
;M013
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M013,W
MOVWF MMA
CALL MMTX2
;M014
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M014,W
MOVWF MMA
CALL MMTX2
;M015
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M015,W
MOVWF MMA
CALL MMTX2
;M016
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M016,W
MOVWF MMA
CALL MMTX2
;M017
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M017,W
MOVWF MMA
CALL MMTX2
;M018
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M018,W
MOVWF MMA
CALL MMTX2
;M019
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M019,W
MOVWF MMA
CALL MMTX2
;M020
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M020,W
MOVWF MMA
CALL MMTX2
;M021
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M021,W
MOVWF MMA
CALL MMTX2
;M022
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M022,W
MOVWF MMA
CALL MMTX2
;M023
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M023,W
MOVWF MMA
CALL MMTX2
;M024
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M024,W
MOVWF MMA
CALL MMTX2
;M025
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M025,W
MOVWF MMA
CALL MMTX2
;M026
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M026,W
MOVWF MMA
CALL MMTX2
;M027
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M027,W
MOVWF MMA
CALL MMTX2
;M028
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M028,W
MOVWF MMA
CALL MMTX2
;M029
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M029,W
MOVWF MMA
CALL MMTX2
;M030
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M030,W
MOVWF MMA
CALL MMTX2
;M031
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M031,W
MOVWF MMA
CALL MMTX2
;M032
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M032,W
MOVWF MMA
CALL MMTX2
;M033
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M033,W
MOVWF MMA
CALL MMTX2
;M034
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M034,W
MOVWF MMA
CALL MMTX2
CALL TIM99
CALL TIM99
;M035
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M035,W
MOVWF MMA
CALL MMTX2
;M036
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M036,W
MOVWF MMA
CALL MMTX2
;M037
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M037,W
MOVWF MMA
CALL MMTX2
;M038
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M038,W
MOVWF MMA
CALL MMTX2
;M039
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M039,W
MOVWF MMA
CALL MMTX2
CALL TIM99
CALL TIM99
;M040
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M040,W
MOVWF MMA
CALL MMTX2
;M041
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M041,W
MOVWF MMA
CALL MMTX2
;M042
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M042,W
MOVWF MMA
CALL MMTX2
;M043
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M043,W
MOVWF MMA
CALL MMTX2
;M044
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M044,W
MOVWF MMA
CALL MMTX2
;M045
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M045,W
MOVWF MMA
CALL MMTX2
;M046
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M046,W
MOVWF MMA
CALL MMTX2
;M047
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M047,W
MOVWF MMA
CALL MMTX2
;M048
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M048,W
MOVWF MMA
CALL MMTX2
;M049
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M049,W
MOVWF MMA
CALL MMTX2
CALL TIM99
CALL TIM99
;M050
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M050,W
MOVWF MMA
CALL MMTX2
;M051
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M051,W
MOVWF MMA
CALL MMTX2
;M052
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M052,W
MOVWF MMA
CALL MMTX2
;M053
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M053,W
MOVWF MMA
CALL MMTX2
;M054
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M054,W
MOVWF MMA
CALL MMTX2
;M055
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M055,W
MOVWF MMA
CALL MMTX2
;M056
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M056,W
MOVWF MMA
CALL MMTX2
;M057
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M057,W
MOVWF MMA
CALL MMTX2
;M058
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M058,W
MOVWF MMA
CALL MMTX2
;M059
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M059,W
MOVWF MMA
CALL MMTX2
;M060
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M060,W
MOVWF MMA
CALL MMTX2
CALL TIM99
CALL TIM99
;M061
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M061,W
MOVWF MMA
CALL MMTX2
;M062
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M062,W
MOVWF MMA
CALL MMTX2
;M063
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M063,W
MOVWF MMA
CALL MMTX2
CALL TIM99
CALL TIM99
;M064
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M064,W
MOVWF MMA
CALL MMTX2
;M065
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M065,W
MOVWF MMA
CALL MMTX2
;M066
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M066,W
MOVWF MMA
CALL MMTX2
;M067
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M067,W
MOVWF MMA
CALL MMTX2
;M068
GOTO $+2
GOTO ENP
MOVF M068,W
MOVWF MMA
CALL MMTX2
;M069
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M069,W
MOVWF MMA
CALL MMTX2
;M070
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M070,W
MOVWF MMA
CALL MMTX2
;M071
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M071,W
MOVWF MMA
CALL MMTX2
;M072
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M072,W
MOVWF MMA
CALL MMTX2
;M073
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M073,W
MOVWF MMA
CALL MMTX2
;M074
GOTO $+2
GOTO ENP
MOVF M074,W
MOVWF MMA
CALL MMTX2
;M075
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M075,W
MOVWF MMA
CALL MMTX2
;M076
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M076,W
MOVWF MMA
CALL MMTX2
;M077
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M077,W
MOVWF MMA
CALL MMTX2
;M078
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M078,W
MOVWF MMA
CALL MMTX2
;M079
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M079,W
MOVWF MMA
CALL MMTX2
;M080
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M080,W
MOVWF MMA
CALL MMTX2
;M081
DECFSZ MM0,F
GOTO $+2
GOTO ENP
MOVF M081,W
MOVWF MMA
CALL MMTX2
;*****************************************
;送出データ終了
ENP
CALL TX_SP
RETURN
;*****************************************
;**********************************
;書出サブルーチン 逆動作だよ 0が1 PB1=/DATA PB2=/CLK
MMTX2
MOVF MMA,W
MOVWF MMB
CALL MMTX1
;キーを離す
CALL TX_HF0
MOVF MMB,W
MOVWF MMA
CALL MMTX1
; CALL TIM100M
; GOTO START ;デバック用
RETURN
;***************************************
MMTX1
;***************************************
;CLK=0を確認
; BTFSS PORTB,5
; GOTO $-1
;***************************************
;スタートビット ”0”
BSF PORTB,1
CALL TIM19
BSF PORTB,2
CALL TIM40
;0bit
BCF PORTB,2
BCF PORTB,1
BTFSS MMA,0
BSF PORTB,1
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit1
BCF PORTB,1
BTFSS MMA,1
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit2
BCF PORTB,1
BTFSS MMA,2
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit3
BCF PORTB,1
BTFSS MMA,3
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit4
BCF PORTB,1
BTFSS MMA,4
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit5
BCF PORTB,1
BTFSS MMA,5
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit6
BCF PORTB,1
BTFSS MMA,6
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit7 "0"
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit8 チェツクサム
BCF PORTB,1
BTFSS MMA,7
BSF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit9 エンドビッド
BCF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
BCF PORTB,2
CALL TIM99
CALL TIM99
CALL TIM99
RETURN
;************************************
;キーを離したときのF0の送出
TX_HF0
;***************************************
;CLK=0を確認
; BTFSS PORTB,5
; GOTO $-1
;***************************************
;スタートビット ”0”
BSF PORTB,1
CALL TIM19
BSF PORTB,2
CALL TIM40
;0bit=”0”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit1=”0”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit2=”0”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit3=”0”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit4=”1”
BCF PORTB,1
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit5=”1”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit6=”1”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit7=”1”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit8 チェツクサム =”1”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
;bit9 ストップビット ”1”
BCF PORTB,2
CALL TIM40
BSF PORTB,2
CALL TIM40
BCF PORTB,2
CALL TIM99
CALL TIM99
CALL TIM99
RETURN
;***********************************
;*************************************
;クロック判定時のタイマ とりあえず
TIM01
NOP
NOP
NOP
RETURN
;********************
;書出確認用タイマ
TIMSET
MOVLW H'69'
MOVWF T6
LOOPSET
BTFSS PORTA,3
GOTO T6END
DECFSZ T6,1
GOTO LOOPSET1
GOTO TIMSETEND
LOOPSET1
CALL TIM99
GOTO LOOPSET
T6END
MOVLW H'01'
MOVWF T6
TIMSETEND
RETURN
TIM99 ;1.56mS?
MOVLW H'B'
MOVWF T5
TIM991
CALL TIM100M2
DECFSZ T5,1
GOTO TIM991
RETURN
;*******************************
;タイマ100mS
TIM100M
CALL TIM100M0
CALL TIM100M0
CALL TIM100M0
RETURN
TIM100M0
MOVLW H'EB'
MOVWF T5
TIM100M1
CALL TIM100M2
DECFSZ T5,1
GOTO TIM100M1
RETURN
TIM100M2
MOVLW H'EB' ;1.56mS?
MOVWF T4
TIM100M3
DECFSZ T4,1
GOTO TIM100M3
RETURN
;********************************
;20μSタイマ 1/2周期
TIM40
CALL TIM19
CALL TIM19
RETURN
;19μSタイマ 1/4周期
TIM19
MOVLW H'1E'
MOVWF T3
LOOPTIM19
DECFSZ T3,1
GOTO LOOPTIM19
RETURN




