








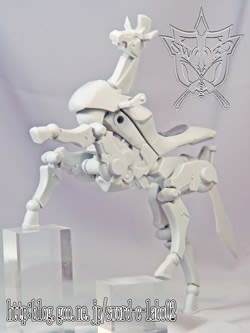
グラニのドロイド…馬の形態は、パーツの取り付けジョイントがそのまま可動軸になっております…という説明はもはや当企画ではいちいち解説する必要も無いでしょうか?
ともあれその可動軸があるため自由にポーズを取らせることが可能です…「ある程度」は。
いや、これでもそこそこ自由自在なのですよ?
しかしそのジョイントが「軸」である関係上どこか動きが直線的で、アクションフィギュアに通じた方にとってはやや物足りなさを感じる事もあるでしょう。
そこでいつものごとく、関節の小改造でより豊かなポージングを取らせることが出来るようにしてみようと思います。
《ご注意》ガレージキットの改造にはある程度の技術と道具等が必要となります。
工作作業は自己の責任で行って下さい。
…申し訳ありません、毎度毎度しつこいですがこれは書いておきませんとね…
気にしだすとキリがありませんので、今回の改造は脚部に限定してみようかと思います。
主な工作は…
1・脚部接続基部のボールジョイント化
2・つま先関節の可動
…の二点。
この二つの工作だけでもかなりポージングが豊富になり、グッと生物感が出てくるのではないかと思います。
改造に用いるのは市販のボールジョイントから5㎜径のジョイント軸と球体関節。

基本的にはこれらの市販関節パーツをそれぞれの部位に置き換えていく…という工作を行っていく予定です。
…ってことで、次回は具体的な工作の解説です。
作業自体はさほど難しくありませんが、脚部前後左右の計四本分を工作しなければいけないので手間はかかります。
工作が終わり次第公開致しますので暫くお待ち下さいませ。
ともあれその可動軸があるため自由にポーズを取らせることが可能です…「ある程度」は。
いや、これでもそこそこ自由自在なのですよ?
しかしそのジョイントが「軸」である関係上どこか動きが直線的で、アクションフィギュアに通じた方にとってはやや物足りなさを感じる事もあるでしょう。
そこでいつものごとく、関節の小改造でより豊かなポージングを取らせることが出来るようにしてみようと思います。
《ご注意》ガレージキットの改造にはある程度の技術と道具等が必要となります。
工作作業は自己の責任で行って下さい。
…申し訳ありません、毎度毎度しつこいですがこれは書いておきませんとね…
気にしだすとキリがありませんので、今回の改造は脚部に限定してみようかと思います。
主な工作は…
1・脚部接続基部のボールジョイント化
2・つま先関節の可動
…の二点。
この二つの工作だけでもかなりポージングが豊富になり、グッと生物感が出てくるのではないかと思います。
改造に用いるのは市販のボールジョイントから5㎜径のジョイント軸と球体関節。
基本的にはこれらの市販関節パーツをそれぞれの部位に置き換えていく…という工作を行っていく予定です。
…ってことで、次回は具体的な工作の解説です。
作業自体はさほど難しくありませんが、脚部前後左右の計四本分を工作しなければいけないので手間はかかります。
工作が終わり次第公開致しますので暫くお待ち下さいませ。














