








第二部~調査と結論~
3.調査の概要と結果
3.1 当初計画
Albacore調査の当初の計画は、2019年11月22日に起案され、現地椴法華側との連絡で良く2020年8月に実施する予定でした。当初の調査概要は、次のようなものです。
1.調査日程
調査は8月24日から全5日間を予定し、悪天候等に備え、予備日を3日間としました。
2.マルチビームソナー調査
推定される沈没位置の周辺海底地形をMBES(マルチビームソナー)で計測し、不陸(海底の凹凸)を調査します。このとき、MBES等の計測機器は、無人船(USV:Unmanned Surface Vehicle)および小型船(次節で述べる第十八仁栄丸)に取り付け、遠隔操縦あるいは自動で計測します。
3.サイドスキャンソナー調査
小型船からサイドスキャンソナーを搭載した曳航体を曳き、不陸の海底音響画像を計測し、人工物を探索します。
4.ソナー計測結果解析
ソナーで計測したデータを分析し、Albacoreと思われるターゲットを絞り込みます。
5.ROV映像調
絞り込んだ候補に対し、小型船からROVを展開して映像観測をおこない、それが何かを確認、記録します。ROVの位置をSSBL(Super Short-Baseline)音響測位装置で記録し、映像が対象のどこを映しているのかを合わせて記録します。
6.映像解析
撮影した映像を解析し、Albacoreである証拠を明らかにします。映像からモザイク画像を作成するなどのして、全体像を明らかにします。
7.調査結果の航海
調査結果はすべて公開・公表します。調査作業の様子をニコニコ生放送によりリアルタイムで放送します。
当初は、USV(図3.1.1)を導入することを技術の目玉の一つとしました。また、4日間あればAlbacoreの発見とROV調査が可能であると想定していました。

図3.1.1 USV:EchoBoat XL:Seafloor社製
全長:2.33m、全幅:0.91m 重量:150kg
3.2 準備
2019年12月19日に、浦は、えさん漁協(〒041-0403 函館市大澗町51-4、電話:0138-84-2231、ファクス:0138-83-3431)二本柳伸義氏(2019年度参事兼総務指導部長、兼昆布種苗センター長)を訪問し、えさん漁協および椴法華支所(〒041-0611 函館市新浜町53、電話:0138-86-2211、ファクス:0138-86-2214)杉山支所長(2019年度)に協力の了解を得ました。
2020年3月30日、浦と柴田と宇賀神は、椴法華漁港を訪問し、えさん漁協椴法華支所の第十八仁栄丸(HK2-19544)の船長佐々木泰一氏と面談し、第十八仁栄丸の利用の了解を得、協力を確認し、漁期を勘案し、2020年5月末に調査をおこなう約束をしました。また、宇賀神は、現場海域では、ニコニコ生放送をおこなうに十分な電波環境があることが確認しました。
第十八仁栄丸(図3.1.2)は
・ホタテ船、7.9トン
・ユニックがついている
・ブリッジは前方にあり、後方は広く空いていて、USVやROVの諸装置を搭載可能

図3.2.1 第十八仁栄丸
しかしながら、COVID-19の感染拡大にともない、2020年5月と約束していた調査はCOVID-19の感染が終息するまで延期することになりました。当時はまだCOVID-19についての情報が少なく、また、椴法華集落は高齢者が多いため、万が一調査関係者によりウイルスが持ち込まれた場合の影響を踏まえての判断でした。
その後、感染第一波が終息してきたので、佐々木船長と連絡を取り、2020年8月26日を調査初日として、再計画し、準備を進め、次のような詳細計画案を作りました。
・2020年8月24日(月曜日)椴法華港入り。宿泊所はホテル恵風
・第1日(25日):椴法華港にて第十八仁栄丸に機材を取付け、USVを搭載。
・第2日(26日):第十八仁栄丸で調査海域にUSVを運び、クレーンで海面に降ろし、自動航行でMBES調査をおこないます。同時に、第十八仁栄丸でもMBES調査をおこないます。
・第3日(27日):USVについては、第2日と同じ。必要に応じて第十八仁栄丸から曳航体を1ノット程度で曳き、サイドスキャン計測をおこないます。前日にターゲットを発見していれば、一日短縮して以下の第4日の調査をおこないます。
・第4日(28日):小型船にROV2台を積み、その内の1台を潜らせ、船名を確認する。調査終了後帰港し、艤装解除する。
・8月31日までを予備日とする。
ACADEMISTの下でクラウドファンディングを開始し、ニコニコ生放送の放送予定を公表しました。しかし、COVID-19の第二波の感染がひろがり、2020年内の調査を断念しました。クラウドファンディングは、目標額の半分に達していましたが、短期間のうちに再開できる見込みがないので、クラウドファンディングを中止しました。
調査延期となった間、種々検討をおこない、深度が200mを越えて深いことが予想されるので、利用を考えている小型ROVでは、十分な調査ができないであろう、という考えに至り、
・ソナーによるAlbacore、またはその候補となる不陸の発見と小型ROVによる第一次調査
・大型ROVによる本格的な第二次調査
の2段階に分けて調査をおこなうことにしました。
2022年3月、COVID-19に対し2020年計画当時に比べ検査が可能となり、また、感染対策など対処が可能になったこともあり、佐々木船長と連絡をとりあい、5月末に第一次調査を実施することにしました。
USVの利用については、USVの準備が間に合わないことが明らかになったので、USVを断念し、漁船をもう一隻チャーターして、そこにMBESを取り付けることにしました。
3.3 第一次調査
(1)第一次調査活動の概要
1.推定される沈没位置の周辺海底地形をMBESで計測し、不陸を調査しました。このとき、MBESの計測機器は、第十八仁栄丸および第十八宝丸(図3.3.1)に取り付け、2台体制で調査しました。

図3.3.1 第十八宝丸。船長小田潤氏
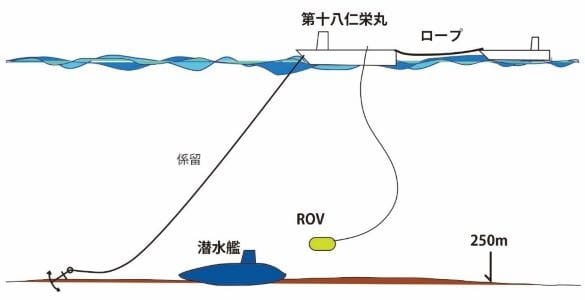
図3.3.2 ROVを展開するための二隻の船の配置
2.2系統のデータを統合し、大きな不陸(数十m程度と思われる)を発見して、候補を絞り込みました。
3.そこをより詳しくMBESで調査しました。
4.第十八仁栄丸から小型ROVを展開して不陸が何であるのかを確認し、撮影しました。ROVの位置は第十八仁栄丸に取り付けられたSSBLによりリアルタイムで計測しました。第十八仁栄丸は、アンカーして基点を作ります。ROVの運転中は、ケーブルトラブルの原因になるので、第十八仁栄丸のプロペラを回すことは極力しません。そのため、第十八仁栄丸を思った位置にもっていくために、図3.3.3のように第十八宝丸と第十八仁栄丸をロープで繋いで、第十八宝丸が第十八仁栄丸を曳きました。
5.ROVが艦橋付近にトラップされたので、ROV撮影は十分にできませんでした。しかし、艦橋周辺の画像を獲得することができました。
6.調査は2022年5月25日から2日間おこないました。
7.調査作業はニコニコ生放送でリアルタイムに放送しました。
Academistによるクラウドファンディングは以下のページで実施しました。
https://academist-cf.com/projects/252?lang=jp
1.4に記述したように、226名の支援者から合計2,101,712円の支援を得ました。
また、ニコニコ生放送は以下のページより配信しました。
https://live.nicovideo.jp/watch/lv326919568
海上保安庁に届け出た調査海域は図2.6.1に示すように、沈没推定位置を中心として、南北4浬、東西3浬の範囲(図3.3.3)です。具体的には下記の4点で囲まれる範囲です。届け出では測地系を厳密に定義しませんでした。
北緯41度51分、東経141度14分 (北西端)
北緯41度51分、東経141度18分 (北東端)
北緯41度47分、東経141度14分 (南西端)
北緯41度47分、東経141度18分 (南東端)

図3.3.3 海上保安庁に届け出た調査範囲。黒枠内
(2)使用機器
1)MBES(Multi-Beam Echo Sounder) 図3.3.4参照.
・SONIC2024(東陽テクニカ提供):R2SONIC社製
・SONIC2026(いであ提供):R2SONIC社製
・受波器: 480×109×190mm 重量12.9kg
・送波器:
SONIC2024:273×108×86mm 重量3.3kg
SONIC2026:480×109×196mm 重量13.4kg
・船上ユニット:280×170×60mm 重量2.4kg

図3.3.4 MBES SONIC
2)ROV(Remotely Operated Vehicle) 図3.3.5参照.
・SeaRover(いであ提供)、Teledyne Benthos製
・本体:
寸法:L756mm×W581×H568mm
重量:32kg
耐圧:300m

図3.3.5 ROV
(3)マルチビームソナー(MBES)調査結果
調査初日の2022年5月25日、早朝05時25分ごろ、椴法華漁港を出港しました。同時にニコニコ生放送を開始しました。
南北方向にまっすぐに走るような計測航路(測線)を設定し、予定観測域の東西の中心からMBES計測を始めました。2時間後の07時40分ごろ、図3.3.6左側に示すように、第十八大栄丸のMBESの表示画面の右舷側に沈没艦が現れました。艦は、図の中央下の地球座標系に変換された計測図と測線、船の位置の表示画面からわかるように、測線に平行、すなわちほぼ北を向いて鎮座していると見受けられました。
MBESの表示は、上下方向は時刻、左右方向は距離です。したがって、表示データの上下方向の長さは、船の前進速度によって変わります。最初の発見の後、数回にわたって、発見艦の上を通り、形状と位置を確認しました。中央の図は、10時ごろ発見艦の中央部分を長手方向に船速を遅くして計測したものです。したがって、艦の映像は、細長く見えます。
また、右側の図は、艦を横断するように船を走らせた結果です。艦の長さが約45mと計測されました。
調査した範囲の海底には、この不陸以外に、人工物らしき不陸はありませんでした。

図3.3.6 MBESによる沈没艦の発見
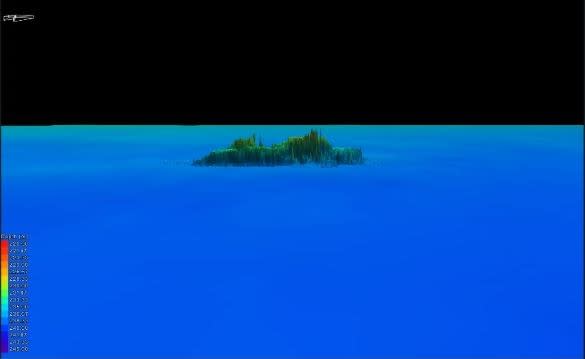
多数のMBESデータを統合して製作した沈没艦の鯨観図を図3.3.7に示します。
この図より、艦は、船首方向を北側に向け、艦橋の前方10mぐらいのところで、艦首部分が失われています。また、艦尾も失われているように見えます。後の第二次調査で明らかになるのですが、艦尾部分は実際には失われておらず、海底に埋もれていて、甲板が一部露出していました。MBESデータは、音響反射店の深度を示すデータなので、周囲との高低差が少ない場合、船体が露出していても、データ上は平らになってしまい、船体が失われたように見えているのです。
艦橋の後ろに高まりが見えます。これは、漁具がからまっているものと当初考えました。しかし、第二次調査で、破壊された構造物が甲板上にあると観察されました。もちろん、漁具もからまっています。
発見位置は、図3.3.8に示したように
北緯41度49分36秒 東経141度16分12秒(WGS84)
水深:237m
の地点です。

図3.3.7 南西側からみた沈没艦の鯨観図
図3.3.9には、海図上(日本測地系)に発見位置と推測していた位置をプロットしました。予測位置よりも北側に
約800m
離れています。予測に用いた資料が、GPS等の正確な位置情報が得られる機器がない時代の記録である事を考慮すれば、2.6節の資料が非常に正確であることが分かりました。

図3.3.8 Albacore発見位置

図3.3.9 発見位置と予測位置の違い
MBESのデータから、艦を東西南北から見た鯨観図を図3.3.10に示します。
N→S

S→N

W→E
E→W

図3.3.10 四方向から見たアルバコア
図3.3.7を含めてみる限り、周囲には他に大型の落下物はないようです。
図3.3.11にMBESデータと、位置と縮尺とを対応するように合わせたAlbacoreの平面図を示します。潜望鏡の位置を目印とし、長さをそろえて書き込みました。
図3.3.12は、側面図で、右舷側から見た図です。第二次調査でROVを展開したときに、右舷側に漁具があり、接近が難しかったので、左舷側から接近しています。

図3.3.11 Albacoreの平面図とMBESデータの対応

図3.3.12 Albacoreの側面図とMBESデータの対応
図3.3.13~15に左舷の真横、および前後から見たMBESのデータ示します。
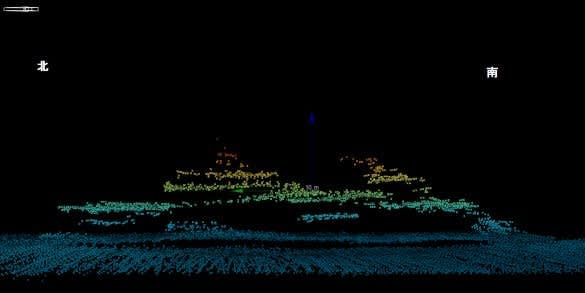
図3.3.13 左舷側から見たAlbacore。左が北で、艦首方向
図3.3.13では、北側が艦首の方向です。艦橋の2段のフロアーおよび胴体が2段になって見えています。胴体は、甲板上面と舷側が見えていると考えられます。
図3.3.14と15は、前後から見た図です。後方から見た図では、艦はほとんど水平になっているように見えます。一方で、前方から見た図では、右舷側に10度程度傾いているように見受けられます。
これは、おそらく、艦橋の後ろのあたりで、船体構造がねじれているのではないかと推測されましたが、側面図の図3.3.12や図3.3.13ではよくわかりません。

図3.3.14 艦首側から見たアルバコア。左の高いものが艦橋の上に立つ潜望鏡

図3.3.15 艦尾側から見たAlbacore。
(4)ROV調査
2022年5月26日、前日と同じように早朝05時54分ごろに椴法華漁港を出港しました。
機器の調整後、09時54分にROVを投入しました。その後の作業の時系列を以下に示します。
10時33分 ROVが海底(深度250m)に到着
10時40分 海底にクモヒトデ、プランクトンがいっぱい
10時53分 潜水艦の潜望鏡っぽい人工物を確認
11時15分 ROVのケーブルがアルバコアに引っかかり動けなくなる
12時12分 ニコ生の「追っかけ再生」で、引っかかり具合を確認
12時40分 視聴ユーザー有志によるツイート投稿などを船内で確認
13時04分 レーダーアンテナのような構造物を確認
14時24分 1箇所のケーブル絡まりが外れる。
14時52分 ケーブルが全て取れたことを確認!
15時30分 献花
16時30分 港に戻る

図3.3.16 投入時のROVと支援船の位置関係
図3.3.16は投入時の第十八大栄丸、ROVおよびAlbacoreの位置関係と航跡です。ROVの位置はSSBLで計測しています。図に見られるように、支援船は北に流され、ROVは投入後に北上しています。
図3.3.17は北北西50mの位置に着底したときの海底の様子です。潮が強いためか、海底の砂の粒子は粗く、多くのクモヒトデが生息していました。
その後に、図3.3.18のようにROVを艦に近づけました。
しかし、支援船の位置をコントロールすることがうまくできなく、ROVは考えていた以上の速度で艦に近づき、図3.3.18に示すように、潜水艦を横断する航路を進みました。艦に衝突したり、艦に絡みつく漁具に絡まらないようにと、高度を上げましたが、間に合わず、ROVは艦橋の右舷側に拘束され、動けなくなりました。

図3.3.17 着底地点の海底

図3.3.18 沈没艦へのアプローチと拘束された位置
SSBLで計測された位置と、ROVからのビデオ映像を見れば、艦橋の上部に拘束されていることは明らかでした。ROVはほとんど動くことができず、カメラをパン/チルトさせて周囲の状況やケーブルの具合を確認することがやっとでした。支援船の位置を調整し、ケーブルを緩めたり引いたりして脱出作業を試みました。
4時間近くの格闘の末、15時近くになって、からんだケーブルを外すことができ、無事にROVを回収することができました。この間、ニコニコ生放送を通じて、助言や励ましをいただいたことを、ここに深く感謝いたします。
このトラブルの原因を挙げると、
1.深度が深く、支援船が弱い体制で、ROVを展開した
2.後部カメラの不調など、ROVに不具合があったにも関わらず、無理に潜らせた
3.ROVと支援船の運転指示体制が十分なものでなかった
4.支援船の位置とROVの位置関係が悪いのにもかかわらず、前進させた
これらは、十分に反省すべき点です。ケーブルが外れ、ROVが拘束状況から離脱できたのは、運が良かったとしか言いようがありません。
(5)ROV観測結果
図3.3.19は、拘束された位置から見た潜望鏡の様子です。多数の漁具が巻き付き、生物が覆っています。

図3.3.19 拘束位置から見た潜望鏡
図3.3.20は、三枚のビデオ画像を繋げて艦橋の様子を示したものです。
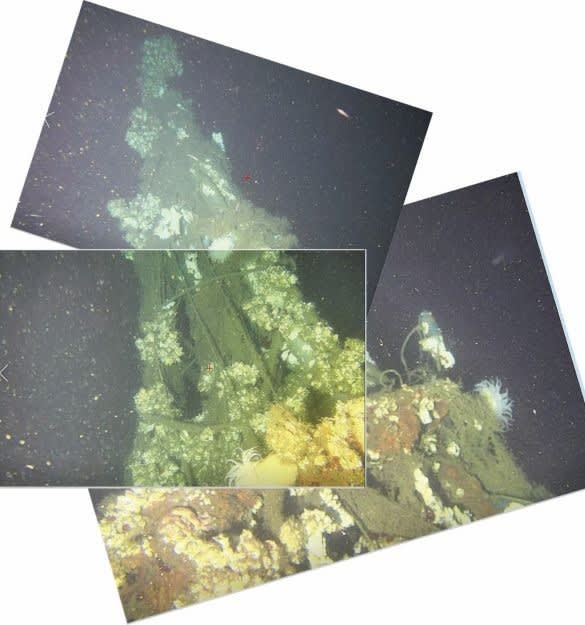
図3.3.20 艦橋上部の潜望鏡などとそれらに絡まる漁具
また、艦橋の前部に図3.3.21のような物体が見えました。調査当時は、これが何かがわからなかったのですが、米国から、SJレーダー(図3.3.22および2.5節参照)であることを教えてもらいました。
Stephen Katona氏はSJレーダーについて次のように連絡してきました。
「The above photograph on the left is the back side of the SJ radar dish from USS Permit SS178 taken on 12 January 1943 following her overhaul at Mare Island Naval Shipyard (USN photo #19 N 40140). Many of the features of this dish are found in the photograph on the right, a snapshot image from the video of the wreckage discovered by Dr. Ura off the coast of Hokkaido, Japan proving this wreckage is a US World War II submarine . However, since by the end of 1944, EVERY US fleet submarine carried the SJ radar, this discovery is not definitive proof that the wreckage is USS Albacore SS 218. At the time the Albacore was lost, even the old S boats had the SJ radar by this point in the war. This is the original version of the SJ radar dish. Starting in early 1945 the boats began receiving an updated version called the SJ 1. It had a bigger wire mesh dish and vastly improved performance and reliability.」

図3.3.21 ROVにより撮影されたSJレーダーの裏側
以下は訳文です
上の左の写真(図3.3.22)は、USS Permit SS178のSJレーダーアンテナの裏側で、Mare Island Naval Shipyardでのオーバーホール後の1943年1月12日に撮影されたものです(USN photo #19 N 40140)。右の写真(図3.3.21)は、浦博士が北海道沖で発見した残骸のビデオからのスナップショットで、このアンテナの多くの特徴が見られ、この残骸が第二次世界大戦中の米国の潜水艦であることを証明するものです。ただし、1944年末にはアメリカ艦隊の潜水艦はすべてSJレーダーを搭載していたので、この残骸がUSS「Albacore」SS-218であることの決定的な証拠にはなっていません。アルバコアが失われた当時は、古いSボートでさえ、SJレーダーを持っていました。これはSJレーダーアンテナの初期型で、1945年初頭からSJ 1と呼ばれる最新型が配備され、金網のアンテナが大きくなり、性能と信頼性が大幅に改善されました。

図3.3.22 ガトー級潜水艦に取り付けられたSJレーダー
(6)第一次調査を終えて
帰港後、岸壁でNHK、函館新聞、北海道新聞から取材を受けました。その結果、NHKニュースの地方版、および二社の新聞社の記事として掲載されました。記事については6章および付属資料をご覧ください。
また、調査を終えて帰港した際に、当時潜水艦の沈没を見たという男性が岸壁まで来られ、話を伺いました。話の内容は、はっきりしているのですが、つじつまが合わないところがあり、残念ながら参考にはなりませんでした。
図3.3.23はROVを回収後に撮影した記念写真で、ROVを無事に回収でき、Albacoreを発見したことで、安堵しています。前列右端が佐々木船長です。

図3.3.23 船上での記念撮影
3.4 第二次調査
計画延期の途中から、小型のROVでの調査は困難を極めることが分かっていましたので、大型(実際に使ったのは中型)ROVを使った第二次調査を行うことを計画していました。第一次調査から大型ROVを使わなかったのは、大型ROVは漁船からは展開できず、相当する大きさの支援船が必要だからです。その用船費は高額であるので、時間のかかるMBES調査を漁船でおこなって経費を節減しようと考えたからです。第一次調査で艦の位置が確定していれば、一日の大型ROV調査で結果をだすことができるはずです。
2020年以前より、タキオニッシュホールディングス株式会社(社長鈴木敏夫様)にご協力をお願いし、ご快諾を得ていました。第一次調査で予定通り位置が確定したので、さっそく第二次調査に向けて準備をいたしました。
ROVや船の準備、海域の漁業活動、海況予測などを検討し、10月2日に調査を実施することに決めました。潮流の弱い小潮の時期です。船はタキオニッシュホールディングス社の傘下である海洋エンジニアリング株式会社(社長鬼頭毅様)の第八開洋丸、ROVはSAAB社製のCougarです。調査日前日に函館港を出港し、調査日の夕刻に帰港するという強行軍で臨みました。
実施にあたり、海洋エンジニアリング株式会社技術部の勝野遊様をはじめとする乗組員の方々にお世話になったことをここに記し、改めて御礼申し上げます。
ニコニコ生放送は、10月2日早朝から始めました。
https://live.nicovideo.jp/watch/lv336612796
図341 ニコニコ生放送の開始画面
なお、非日本語圏の視聴者が調査作業を理解できるように、同時通訳を行いました。
9時間4分の放送で
参加者:28,144
コメント:9,076
とても良かった:96.2
よかった:2.7%
という結果を得ました。
また、1.4で記述したようにACADEMISTでクラウドファンディングをおこないました。
https://academist-cf.com/projects/265/comments?lang=ja
最終的には、216名の支援者より2,106,300円の支援を得ました。
(1)使用機器と作業
1)第八開洋丸:海洋エンジニアリング社所属
全長:46.61m
幅:8.00m
総トン数:272トン

図3.4.1 第八開洋丸
2)ROV Cougar XT
(SAAB社製、海洋エンジニアリング提供)
全長:1.515m、
全幅:1.0m、
全高:0.79m
重量:409kg
最大前進速度:3.2knots
最大潜航深度:2,000m
INS(Inertial Navigation System):Rovin Nano(ixblue)

図3.4.2 ROV Cougar
3)SSBL測位装置:
μPAP (Kongsberg Maritime社、海洋エンジニアリング提供)
4)MBES(Multi-Beam Echo Sounder):
Kongsberg EM(第八開洋丸備え付け)
図3.4.3は第八開洋丸の甲板上に設置されたROVと着水揚収のために配置された機器類です。図3.4.4はケーブル類などを示しています。
ROVは、図3.4.6に模式的に示されるように、ケージ(かご)に入れられて、海底に降ろされます。ケージとウインチを繋ぐゲーブルは一次ケーブルとよばれ、ROVに電力を送りビデオ情報や運転指令をやりとりする線が入っています。また、海面から吊り上げるために、必要な張力を受け持つ強度メンバーが入っていて太く長いものです。
ROVを格納したケージが目標位置近くに到達すると、ROVはケージに巻かれている二次ケーブルを伸ばしながら発進し、調査対象に接近して調査をおこないます。二次ケーブルは、多大な張力を受け持つことがないので、一次ケーブルに比べて細く、軽く柔軟性に富んでいるので、ROVの移動は容易になります。また、間にケージを挟むことで、水上の母船の動揺がROVに直接伝わらないために、安定した観測が可能です。
第八開洋丸には、DPS(Dynamic Positioning System)が搭載されているので、少々の風や波や潮流があっても、アンカーを打つことなく一点に留まることができます。

図3.4.3 甲板上の装置類。大きな一次ケーブルウインチとROVに繋がる鎧装一次ケーブル。図341のブリッジの前側に海から見たROVとクレーン装置が見えます。
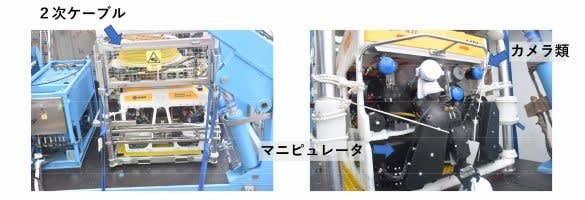
図3.4.4 ケージに取り付けられた二次ケーブルと巻き取り装置、およびROV正面のカメラ類とマニピュレータ

図3.4.5 ROVの展開の模式図。ケージは魚釣りのおもりの役目もしています。
ROVの準備や操縦は、海洋エンジニアリング株式会社の乗組員がおこないます。操縦者は操縦コンテナ内で操作をおこない、指令は、ブリッジの後ろの部屋から、船長から母船の状況を聞きつつ、操縦者にROVの行動を指示します。私たちは、司令の傍にいて、司令に調査したい場所への移動や、カメラの向きやズームなどの依頼をします。図3.4.6は、ブリッジ後方の部屋にしつらえられたDisplayの様子です。6つのDisplayがROVからの映像、ソナー画像、SSBLやMBESのデータを表示します。

図3.4.6 ブリッジ後部の司令室
(2)MBES(マルチビームソナー)調査
2022年10月1日夕刻に函館港を出港した第八開洋丸は、2日朝、現場海域にてまず、MBESによりAlbacoreを再確認し、第一次調査と状況が同じこと確認しました。図3.4.7は反射強度を示しています。5月の調査では反射強度を計測していなかったのですが、今回はMBES調査の際にリアルタイムで反射強度のデータを見ました。その結果、これまで不陸として見えていなかった艦尾側の先に、強い反射があることが分かりました。
図3.4.7は、反射の強さを色で表しています。色が白いところが反射の強いところです。ちょっと見にくいのですが、青の点線は、前回も今回も不陸として見えているAlbacoreです。赤い点線で囲った範囲が比較的強い反射があるところを示しています。第一次調査で見えていた艦尾部の不陸の後ろ側に強い反射があり、そこに何かがが散らばっているか、埋まっていることが推測されました。
青い実線は、後にROVで確認された艦尾部分です。前方破断点から約60mの長さに渡っていることがわかります。その後ろにさらに15mぐらいの長さの物体が海底面下にあるようです。すなわち、艦の前端20mが破壊されて失われ、その後ろの約75mが一体として残っていると考えられます。
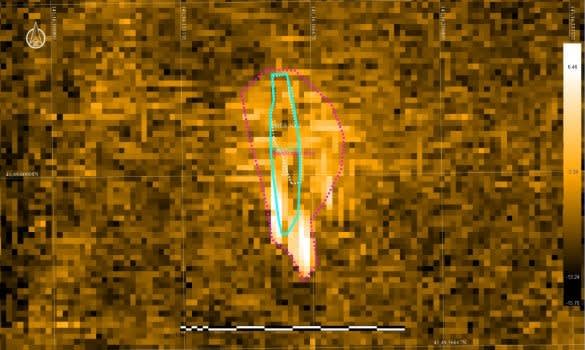
図3.4.7 MBESで計測した、海底からの音波の反射強度
(3)ROV調査
Albacoreの真上で、献花をしたのちに、08時18分40秒、ROVは着水し、潜航を開始しました。海底に到着後、一旦引き上げてケーブルを調整して、09時34分56秒に再投入しました。
5月の調査を踏まえ、まず船橋を目指しました。潮と風を勘案してAlbacoreの東側から図3.4.8のようにROVを進ませました。

図3.4.8 最初のアプローチ。矢印は最初のアプローチの方向。星印の所に図3.4.9の構造物がある。黄色い縦の線は、そこに浮きのついた綱などの漁具が存在していた場所。
しばらくいくと、図3.4.9のような艦を構成する構造部材の一部と思われるものが、海底にありました。規則的に並んだ孔は、図3.4.10ような空気抜きの孔と思われます。あるいは肋板のような構造部材で、そこに軽目孔があいているのかもしれません。いずれにしても、Albacoreの一部であると思われます。
それを越えてさらに西に進むと、浮きを付けたロープが水中をあちこち走り、漁網も見えました。その上を越えて西に進むのは危険と考えて、漁具に沿って南下し、ついで若干浮上して艦を乗り越え、西側(左舷側)に回り込みました。


図3.4.9 艦橋から離れた海底に落下していたアルバコアの外板と考えられる残骸。左図の赤丸のような軽め孔があいていた。あるいは、肋板のような構造部材の軽目孔かもしれない。
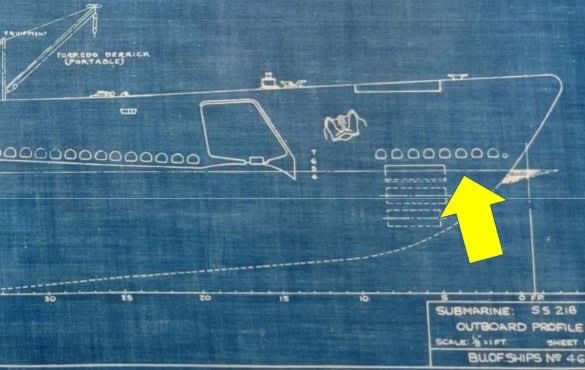
図3.4.10 構造部材に開けられた孔。艦首部および潜水舵の後ろに並んでいる。
以後、13時40分まで調査を続けました。残念なことに、風が強くなり、午後から海況が悪くなることが予想されていたので、調査を打ち切り、ROVを揚収することにしました。
3.5 撮影されたAlbacore
撮影したビデオのクリップを示し、それがAlbacoreのどの部分であるかを解説します。
図3.5.1は、撮影された位置と撮影方向を示しています。

図3.5.1 ビデオからクリッピングした画像の撮影位置。推定位置なので、必ずしも正確でないことに注意してください。矢印内の番号は、本節の1)から14)の番号に対応しています。
1)左舷艦橋側面と手すり
図3.5.2は艦橋の左舷上部デッキの後方を側面から見たところです。四角く窓が開いているのが見えます。窓の間の柱は、生物が付着していて、太く見えています。その上に手すりがあります。図3.4.3は、沈没以前の写真および水中写真に構造物を書き込んだもので、左の写真の黄色枠のあたりを横から撮影しています。形状は、よく一致しています。ただし、写真にある垂直梯子は脱落しているのか、見当たりません。
なお、艦の周りには、多くのタラが生息していました。図3.5.2の中央に一尾見えます。

図3.5.2 艦橋後部と手すり


図3.5.3 写真との対応。左図の□の部分を横から見ている。左図は2.5.4と同じ
2)艦橋後部と手すり、照明台座
図3.5.4は、図3.5.2の右奥側、すなわち艦橋後部の右舷側を上方から見た写真です。角で曲がった手すりが見えます。図3.5.3には、手すりの上に二本足の鉄筋でできたようなものが立っていますが、それも図3.5.4に見えています。その内側に潜望鏡の支持構造部材の基部があります。図3.5.3の写真には、そこにサーチライトが取り付けられていますが、図3.5.4ではサーチライトは失われていて、その台座のみが残っているのが見えます。

図3.5.4 艦橋後部右舷側の手すり、潜望鏡支持構造、サーチライトの台座など
3)低周波ループアンテナ
二つの潜望鏡の間には、ドーナッツ状の低周波ループアンテナがついています。図3.5.5は、わかりにくいのですが、中央部分に生物に覆われて白く写っています。右に立っているのは第二潜望鏡です。これを見ると左側の第一潜望鏡は、ループアンテナの上のところで、上部が失われています。それとともに次節で述べるSJレーダー(図3.3.21参照)の柱が外れて前方にかしいでいます。
このループアンテナに当初は気づかなかったのですが、米国の指摘によりここに存在することがわかりました。
図3.5.5(1) 生物に覆われたループアンテナ。ほぼ横側から見ているので直線状に白く見えている。図3.5.5(2)を参照して位置を確かめてください。

図3.5.5(2) 二つの潜望鏡の間に取り付けられたループアンテナ。その手前に立つのがSJレーダーの支柱
4)SJレーダー
第一次調査で確認されたSJレーダーは、図3.5.6のように外観されます。図3.3.21は右舷側から至近距離で撮影されていますが、図3.5.6は左舷側からやや離れて撮影しており、レーダーそのものの形ははっきりしませんが、支柱の様子がみてとれます。潜望鏡に並立していたのが外れて、前方に傾いでいる。

図3.5.6 SJレーダーとその支柱
5)艦橋前部の張り出し
図3.5.7は、艦橋の前にある張り出し部で、その上に機関銃座があります。この下側にいくつかの特徴的な形状があるはずなのですが、残念ならが撮影できませんでした。また、向こう側に回り込もうとしましたが、漁具に阻まれ、断念しました。

図3.5.7 艦橋前部の円形の張り出し部分。
6)機関銃台座
図3.5.7の中央部にあるのは機関銃の台座で、図2.5.1の写真でよくわかります。図3.5.8は台座の頂部です。

図3.5.8 艦橋前部の張り出しに設置されている機関銃の台座。図2.5.1ではこの上に機関銃が乗っている。
7)クリート
図3.5.9は、左舷側甲板上で艦橋の少し前にあるクリート(係船金物)が写っています。水抜き孔も見えています。図3.5.10の右側は、ヨット用の金物ですが形状はほぼ同じです。左側は、模型上に据え付けられたクリートを示しています。水抜き孔もほぼ対応しています。このクリートを基点として、艦橋の位置が分かります。残念なことに、クリートの近くの甲板は破壊されていて、そこにあるものがよくわかりません。外板は、水抜き穴のある局面部分の下が破壊されていることが見えます。

図3.5.9 左舷側にあるクリート


図3.5.10 クリートの説明と模型上のクリート
8)艦橋横水抜き穴と三本足のスタンション
図3.5.11は、図3.5.10より少し艦尾にいった部分で撮影した舷側上部の水抜き穴と甲板上のスタンションです。このスタンションは左右に斜めの支持材がついています。図2.5.1や図2.5.2では、片一方に支持材のついたスタンションが見えるのですが、両方についたものは見当たりません。その後に取り付けたものではないかと考えられます。

図3.5.11 水抜き穴と右側上部にある三本足のスタンション。周囲にはタラが多く生息していました。
9)ハッチ
図2.5.2のデッキ上にハッチが見えます。図3.5.12はそのハッチです。図中の右上にインポーズされているROVのHeading角が71.7度であることからハッチの後方から艦首の方向を見ている写真になっています。すなわち、艦尾側がまるくなっているので、図2.5.1と形状が対応しています。なお、カメラにはパンチルト装置がついているので、カメラの方向はHeading角とは必ずしも一致しないことに注意してください。
図3.5.13の青図や図2.4.1の同形艦の写真を見ると、艦の中央線状に2か所、このようなハッチが見受けられます。図3.5.12のハッチは図3.5.13の前方のハッチであると考えられます。後方のハッチは図3.5.15のポールの前に見えています。
なお、図2.5.2では、艦橋のすぐ後ろの中央線から右舷側に少しずれた位置に開いたハッチが見えています。

図3.5.12 甲板上のハッチ

図3.5.13 甲板上の二か所のハッチ
10)後部デッキ
図3.5.14は後部デッキを上から見た図です。比較的よい状態が保たれています。図3.5.12や図3.5.15にも同様の状況が映し出されています。濁りがあるために、遠目がきかないのが残念です。

図3.5.14 後部甲板の状況
11)後部デッキ上のポール
図3.5.15は、後部デッキの中央に立つポールです。これが何かは、よくわからないのですが、手すりのスタンション(取り付け金物)か、通信用の電線を張っていた柱ではないかと思われますが、よくわかりません。アメリカからの情報によれば、後部にアンテナポールはないので、スタンションではないかということでした。しかし、形状がスタンションではないように見受けられます。この位置には、デリック(一種のクレーン)ポストが立っていたのですが、沈没時にデリックポストが立ったままであったとは思われません。図3.5.16の模型には、この位置にポールが建てられていて、架空線のための柱である可能性が高いと思います。
ポールの前側にハッチが見えます。
図3.5.17は、ポールの周辺まで広く見た写真です。右舷側の後部のデッキが砂で覆われ始めているところが見て取れます。

図3.5.15 中央線上に立つポールとその前方のハッチ

図3.5.16 模型上のポールとその後ろにある魚雷用のハッチ。魚雷用のハッチ部分は海底土に覆われてしまっていて確認できていません。

図3.5.17 砂に覆われるポールの右舷側
12)舷側に取り付けられた手がかり
図3.5.18の上部中央に写っている線状のものは、舷側に取り付けられた手がかりであると思われます。図2.3.1の青図の立面図のデリックの位置に二つ描かれています。

図3.5.18 舷側の手がかり
13)砂に埋もれかかった右舷後部
ポールの右舷側にROVを回り込ませ、海底面と接する部分が図3.5.19です。左側にいるタラよりもさらに後部は砂に埋まっています。

図3.5.19 砂に接する右舷側。舷側はほぼ垂直で、艦が水平に鎮座していることが分かります。
14)魚雷発射管の前部の外板か?
潜望鏡の立つ艦橋のすぐ後ろの部分は、残骸でおおわれています。その上に、図3.5.20のような外板と見られる構造物がありました。そこには、二本のへこみがあります。
Albacoreの艦首には左右に3門ずつ、艦尾には左右に2門ずつの魚雷発射装置が装備され、図3.3.9のように配置されています。その外側の外板の形状ははっきりしないのですが、図2.3.3の模型の写真を参照してください。

図3.5.20 魚雷発射装置の前部であると思われる外板のへこみ
3.6 第二次調査を終えて
台風の接近で、十分な調査時間を取れなかったものの、沈没艦の主要部分を撮影することができました。マリンスノーや生物が多く、濁っていて見通しが悪いこと、漁具がからんでいること、など困難な状況にありながらも、安全な調査をおこなうことができました。また、同時通訳付きのニコニコ生放送に多くの声援を得て、調査は無事に終了しました。ご支援を賜った方々、ご協力くださった方々、ボランティアの方々に深くお礼申し上げます。
図3.4.22は船の方々とともに集合写真を撮影しました。

図3.6.22 ROVの横での記念撮影
4.アルバコアであることの確信
以下に確認された事実を列挙します。
1)5月にMBESで調査した海域には、他に沈没艦船はありませんでした。
2)2.6節で述べたように、浮遊物に明らかにAlbacoreのものであるというものがありました。
3)ROV調査の結果、潜水艦であることは明らかです。また、全体的な形状はAlbacoreの形状と矛盾がありません。
4)図3.4.2の艦橋の形状は、ガトー級の潜水艦の特徴を表しています。
5)艦橋上部の手すりの配置、サーチライトの台座は、Albacoreの写真と一致します。
6)図3.3.21のSJレーダーは、Albacoreに取り付けられていたはずno
ものと一致し、米国の潜水艦であることの証拠です。
7)艦橋前部の円形の張り出しとその上の機関銃台座は、Albacoreの写真に一致します。
8)後部甲板上に立つポールについては、対応する情報がなく、不明です。
9)撮影されたビデオ画像から、Albacoreでないといえるものはありません。
10)この周辺海域にガトー級の潜水艦が他にも沈んでいるという情報はありませんし、可能性もありません。
以上のことから、発見された潜水艦は、Albacoreであると断定できます。また、次章で述べるように、米国政府機関が私たちの発見した沈没潜水艦をAlbacoreであると認定しました。
3.調査の概要と結果
3.1 当初計画
Albacore調査の当初の計画は、2019年11月22日に起案され、現地椴法華側との連絡で良く2020年8月に実施する予定でした。当初の調査概要は、次のようなものです。
1.調査日程
調査は8月24日から全5日間を予定し、悪天候等に備え、予備日を3日間としました。
2.マルチビームソナー調査
推定される沈没位置の周辺海底地形をMBES(マルチビームソナー)で計測し、不陸(海底の凹凸)を調査します。このとき、MBES等の計測機器は、無人船(USV:Unmanned Surface Vehicle)および小型船(次節で述べる第十八仁栄丸)に取り付け、遠隔操縦あるいは自動で計測します。
3.サイドスキャンソナー調査
小型船からサイドスキャンソナーを搭載した曳航体を曳き、不陸の海底音響画像を計測し、人工物を探索します。
4.ソナー計測結果解析
ソナーで計測したデータを分析し、Albacoreと思われるターゲットを絞り込みます。
5.ROV映像調
絞り込んだ候補に対し、小型船からROVを展開して映像観測をおこない、それが何かを確認、記録します。ROVの位置をSSBL(Super Short-Baseline)音響測位装置で記録し、映像が対象のどこを映しているのかを合わせて記録します。
6.映像解析
撮影した映像を解析し、Albacoreである証拠を明らかにします。映像からモザイク画像を作成するなどのして、全体像を明らかにします。
7.調査結果の航海
調査結果はすべて公開・公表します。調査作業の様子をニコニコ生放送によりリアルタイムで放送します。
当初は、USV(図3.1.1)を導入することを技術の目玉の一つとしました。また、4日間あればAlbacoreの発見とROV調査が可能であると想定していました。
図3.1.1 USV:EchoBoat XL:Seafloor社製
全長:2.33m、全幅:0.91m 重量:150kg
3.2 準備
2019年12月19日に、浦は、えさん漁協(〒041-0403 函館市大澗町51-4、電話:0138-84-2231、ファクス:0138-83-3431)二本柳伸義氏(2019年度参事兼総務指導部長、兼昆布種苗センター長)を訪問し、えさん漁協および椴法華支所(〒041-0611 函館市新浜町53、電話:0138-86-2211、ファクス:0138-86-2214)杉山支所長(2019年度)に協力の了解を得ました。
2020年3月30日、浦と柴田と宇賀神は、椴法華漁港を訪問し、えさん漁協椴法華支所の第十八仁栄丸(HK2-19544)の船長佐々木泰一氏と面談し、第十八仁栄丸の利用の了解を得、協力を確認し、漁期を勘案し、2020年5月末に調査をおこなう約束をしました。また、宇賀神は、現場海域では、ニコニコ生放送をおこなうに十分な電波環境があることが確認しました。
第十八仁栄丸(図3.1.2)は
・ホタテ船、7.9トン
・ユニックがついている
・ブリッジは前方にあり、後方は広く空いていて、USVやROVの諸装置を搭載可能
図3.2.1 第十八仁栄丸
しかしながら、COVID-19の感染拡大にともない、2020年5月と約束していた調査はCOVID-19の感染が終息するまで延期することになりました。当時はまだCOVID-19についての情報が少なく、また、椴法華集落は高齢者が多いため、万が一調査関係者によりウイルスが持ち込まれた場合の影響を踏まえての判断でした。
その後、感染第一波が終息してきたので、佐々木船長と連絡を取り、2020年8月26日を調査初日として、再計画し、準備を進め、次のような詳細計画案を作りました。
・2020年8月24日(月曜日)椴法華港入り。宿泊所はホテル恵風
・第1日(25日):椴法華港にて第十八仁栄丸に機材を取付け、USVを搭載。
・第2日(26日):第十八仁栄丸で調査海域にUSVを運び、クレーンで海面に降ろし、自動航行でMBES調査をおこないます。同時に、第十八仁栄丸でもMBES調査をおこないます。
・第3日(27日):USVについては、第2日と同じ。必要に応じて第十八仁栄丸から曳航体を1ノット程度で曳き、サイドスキャン計測をおこないます。前日にターゲットを発見していれば、一日短縮して以下の第4日の調査をおこないます。
・第4日(28日):小型船にROV2台を積み、その内の1台を潜らせ、船名を確認する。調査終了後帰港し、艤装解除する。
・8月31日までを予備日とする。
ACADEMISTの下でクラウドファンディングを開始し、ニコニコ生放送の放送予定を公表しました。しかし、COVID-19の第二波の感染がひろがり、2020年内の調査を断念しました。クラウドファンディングは、目標額の半分に達していましたが、短期間のうちに再開できる見込みがないので、クラウドファンディングを中止しました。
調査延期となった間、種々検討をおこない、深度が200mを越えて深いことが予想されるので、利用を考えている小型ROVでは、十分な調査ができないであろう、という考えに至り、
・ソナーによるAlbacore、またはその候補となる不陸の発見と小型ROVによる第一次調査
・大型ROVによる本格的な第二次調査
の2段階に分けて調査をおこなうことにしました。
2022年3月、COVID-19に対し2020年計画当時に比べ検査が可能となり、また、感染対策など対処が可能になったこともあり、佐々木船長と連絡をとりあい、5月末に第一次調査を実施することにしました。
USVの利用については、USVの準備が間に合わないことが明らかになったので、USVを断念し、漁船をもう一隻チャーターして、そこにMBESを取り付けることにしました。
3.3 第一次調査
(1)第一次調査活動の概要
1.推定される沈没位置の周辺海底地形をMBESで計測し、不陸を調査しました。このとき、MBESの計測機器は、第十八仁栄丸および第十八宝丸(図3.3.1)に取り付け、2台体制で調査しました。
図3.3.1 第十八宝丸。船長小田潤氏
図3.3.2 ROVを展開するための二隻の船の配置
2.2系統のデータを統合し、大きな不陸(数十m程度と思われる)を発見して、候補を絞り込みました。
3.そこをより詳しくMBESで調査しました。
4.第十八仁栄丸から小型ROVを展開して不陸が何であるのかを確認し、撮影しました。ROVの位置は第十八仁栄丸に取り付けられたSSBLによりリアルタイムで計測しました。第十八仁栄丸は、アンカーして基点を作ります。ROVの運転中は、ケーブルトラブルの原因になるので、第十八仁栄丸のプロペラを回すことは極力しません。そのため、第十八仁栄丸を思った位置にもっていくために、図3.3.3のように第十八宝丸と第十八仁栄丸をロープで繋いで、第十八宝丸が第十八仁栄丸を曳きました。
5.ROVが艦橋付近にトラップされたので、ROV撮影は十分にできませんでした。しかし、艦橋周辺の画像を獲得することができました。
6.調査は2022年5月25日から2日間おこないました。
7.調査作業はニコニコ生放送でリアルタイムに放送しました。
Academistによるクラウドファンディングは以下のページで実施しました。
https://academist-cf.com/projects/252?lang=jp
1.4に記述したように、226名の支援者から合計2,101,712円の支援を得ました。
また、ニコニコ生放送は以下のページより配信しました。
https://live.nicovideo.jp/watch/lv326919568
海上保安庁に届け出た調査海域は図2.6.1に示すように、沈没推定位置を中心として、南北4浬、東西3浬の範囲(図3.3.3)です。具体的には下記の4点で囲まれる範囲です。届け出では測地系を厳密に定義しませんでした。
北緯41度51分、東経141度14分 (北西端)
北緯41度51分、東経141度18分 (北東端)
北緯41度47分、東経141度14分 (南西端)
北緯41度47分、東経141度18分 (南東端)
図3.3.3 海上保安庁に届け出た調査範囲。黒枠内
(2)使用機器
1)MBES(Multi-Beam Echo Sounder) 図3.3.4参照.
・SONIC2024(東陽テクニカ提供):R2SONIC社製
・SONIC2026(いであ提供):R2SONIC社製
・受波器: 480×109×190mm 重量12.9kg
・送波器:
SONIC2024:273×108×86mm 重量3.3kg
SONIC2026:480×109×196mm 重量13.4kg
・船上ユニット:280×170×60mm 重量2.4kg
図3.3.4 MBES SONIC
2)ROV(Remotely Operated Vehicle) 図3.3.5参照.
・SeaRover(いであ提供)、Teledyne Benthos製
・本体:
寸法:L756mm×W581×H568mm
重量:32kg
耐圧:300m
図3.3.5 ROV
(3)マルチビームソナー(MBES)調査結果
調査初日の2022年5月25日、早朝05時25分ごろ、椴法華漁港を出港しました。同時にニコニコ生放送を開始しました。
南北方向にまっすぐに走るような計測航路(測線)を設定し、予定観測域の東西の中心からMBES計測を始めました。2時間後の07時40分ごろ、図3.3.6左側に示すように、第十八大栄丸のMBESの表示画面の右舷側に沈没艦が現れました。艦は、図の中央下の地球座標系に変換された計測図と測線、船の位置の表示画面からわかるように、測線に平行、すなわちほぼ北を向いて鎮座していると見受けられました。
MBESの表示は、上下方向は時刻、左右方向は距離です。したがって、表示データの上下方向の長さは、船の前進速度によって変わります。最初の発見の後、数回にわたって、発見艦の上を通り、形状と位置を確認しました。中央の図は、10時ごろ発見艦の中央部分を長手方向に船速を遅くして計測したものです。したがって、艦の映像は、細長く見えます。
また、右側の図は、艦を横断するように船を走らせた結果です。艦の長さが約45mと計測されました。
調査した範囲の海底には、この不陸以外に、人工物らしき不陸はありませんでした。
図3.3.6 MBESによる沈没艦の発見
多数のMBESデータを統合して製作した沈没艦の鯨観図を図3.3.7に示します。
この図より、艦は、船首方向を北側に向け、艦橋の前方10mぐらいのところで、艦首部分が失われています。また、艦尾も失われているように見えます。後の第二次調査で明らかになるのですが、艦尾部分は実際には失われておらず、海底に埋もれていて、甲板が一部露出していました。MBESデータは、音響反射店の深度を示すデータなので、周囲との高低差が少ない場合、船体が露出していても、データ上は平らになってしまい、船体が失われたように見えているのです。
艦橋の後ろに高まりが見えます。これは、漁具がからまっているものと当初考えました。しかし、第二次調査で、破壊された構造物が甲板上にあると観察されました。もちろん、漁具もからまっています。
発見位置は、図3.3.8に示したように
北緯41度49分36秒 東経141度16分12秒(WGS84)
水深:237m
の地点です。
図3.3.7 南西側からみた沈没艦の鯨観図
図3.3.9には、海図上(日本測地系)に発見位置と推測していた位置をプロットしました。予測位置よりも北側に
約800m
離れています。予測に用いた資料が、GPS等の正確な位置情報が得られる機器がない時代の記録である事を考慮すれば、2.6節の資料が非常に正確であることが分かりました。
図3.3.8 Albacore発見位置
図3.3.9 発見位置と予測位置の違い
MBESのデータから、艦を東西南北から見た鯨観図を図3.3.10に示します。
N→S
S→N
W→E
E→W
図3.3.10 四方向から見たアルバコア
図3.3.7を含めてみる限り、周囲には他に大型の落下物はないようです。
図3.3.11にMBESデータと、位置と縮尺とを対応するように合わせたAlbacoreの平面図を示します。潜望鏡の位置を目印とし、長さをそろえて書き込みました。
図3.3.12は、側面図で、右舷側から見た図です。第二次調査でROVを展開したときに、右舷側に漁具があり、接近が難しかったので、左舷側から接近しています。
図3.3.11 Albacoreの平面図とMBESデータの対応
図3.3.12 Albacoreの側面図とMBESデータの対応
図3.3.13~15に左舷の真横、および前後から見たMBESのデータ示します。
図3.3.13 左舷側から見たAlbacore。左が北で、艦首方向
図3.3.13では、北側が艦首の方向です。艦橋の2段のフロアーおよび胴体が2段になって見えています。胴体は、甲板上面と舷側が見えていると考えられます。
図3.3.14と15は、前後から見た図です。後方から見た図では、艦はほとんど水平になっているように見えます。一方で、前方から見た図では、右舷側に10度程度傾いているように見受けられます。
これは、おそらく、艦橋の後ろのあたりで、船体構造がねじれているのではないかと推測されましたが、側面図の図3.3.12や図3.3.13ではよくわかりません。
図3.3.14 艦首側から見たアルバコア。左の高いものが艦橋の上に立つ潜望鏡
図3.3.15 艦尾側から見たAlbacore。
(4)ROV調査
2022年5月26日、前日と同じように早朝05時54分ごろに椴法華漁港を出港しました。
機器の調整後、09時54分にROVを投入しました。その後の作業の時系列を以下に示します。
10時33分 ROVが海底(深度250m)に到着
10時40分 海底にクモヒトデ、プランクトンがいっぱい
10時53分 潜水艦の潜望鏡っぽい人工物を確認
11時15分 ROVのケーブルがアルバコアに引っかかり動けなくなる
12時12分 ニコ生の「追っかけ再生」で、引っかかり具合を確認
12時40分 視聴ユーザー有志によるツイート投稿などを船内で確認
13時04分 レーダーアンテナのような構造物を確認
14時24分 1箇所のケーブル絡まりが外れる。
14時52分 ケーブルが全て取れたことを確認!
15時30分 献花
16時30分 港に戻る
図3.3.16 投入時のROVと支援船の位置関係
図3.3.16は投入時の第十八大栄丸、ROVおよびAlbacoreの位置関係と航跡です。ROVの位置はSSBLで計測しています。図に見られるように、支援船は北に流され、ROVは投入後に北上しています。
図3.3.17は北北西50mの位置に着底したときの海底の様子です。潮が強いためか、海底の砂の粒子は粗く、多くのクモヒトデが生息していました。
その後に、図3.3.18のようにROVを艦に近づけました。
しかし、支援船の位置をコントロールすることがうまくできなく、ROVは考えていた以上の速度で艦に近づき、図3.3.18に示すように、潜水艦を横断する航路を進みました。艦に衝突したり、艦に絡みつく漁具に絡まらないようにと、高度を上げましたが、間に合わず、ROVは艦橋の右舷側に拘束され、動けなくなりました。
図3.3.17 着底地点の海底
図3.3.18 沈没艦へのアプローチと拘束された位置
SSBLで計測された位置と、ROVからのビデオ映像を見れば、艦橋の上部に拘束されていることは明らかでした。ROVはほとんど動くことができず、カメラをパン/チルトさせて周囲の状況やケーブルの具合を確認することがやっとでした。支援船の位置を調整し、ケーブルを緩めたり引いたりして脱出作業を試みました。
4時間近くの格闘の末、15時近くになって、からんだケーブルを外すことができ、無事にROVを回収することができました。この間、ニコニコ生放送を通じて、助言や励ましをいただいたことを、ここに深く感謝いたします。
このトラブルの原因を挙げると、
1.深度が深く、支援船が弱い体制で、ROVを展開した
2.後部カメラの不調など、ROVに不具合があったにも関わらず、無理に潜らせた
3.ROVと支援船の運転指示体制が十分なものでなかった
4.支援船の位置とROVの位置関係が悪いのにもかかわらず、前進させた
これらは、十分に反省すべき点です。ケーブルが外れ、ROVが拘束状況から離脱できたのは、運が良かったとしか言いようがありません。
(5)ROV観測結果
図3.3.19は、拘束された位置から見た潜望鏡の様子です。多数の漁具が巻き付き、生物が覆っています。
図3.3.19 拘束位置から見た潜望鏡
図3.3.20は、三枚のビデオ画像を繋げて艦橋の様子を示したものです。
図3.3.20 艦橋上部の潜望鏡などとそれらに絡まる漁具
また、艦橋の前部に図3.3.21のような物体が見えました。調査当時は、これが何かがわからなかったのですが、米国から、SJレーダー(図3.3.22および2.5節参照)であることを教えてもらいました。
Stephen Katona氏はSJレーダーについて次のように連絡してきました。
「The above photograph on the left is the back side of the SJ radar dish from USS Permit SS178 taken on 12 January 1943 following her overhaul at Mare Island Naval Shipyard (USN photo #19 N 40140). Many of the features of this dish are found in the photograph on the right, a snapshot image from the video of the wreckage discovered by Dr. Ura off the coast of Hokkaido, Japan proving this wreckage is a US World War II submarine . However, since by the end of 1944, EVERY US fleet submarine carried the SJ radar, this discovery is not definitive proof that the wreckage is USS Albacore SS 218. At the time the Albacore was lost, even the old S boats had the SJ radar by this point in the war. This is the original version of the SJ radar dish. Starting in early 1945 the boats began receiving an updated version called the SJ 1. It had a bigger wire mesh dish and vastly improved performance and reliability.」
図3.3.21 ROVにより撮影されたSJレーダーの裏側
以下は訳文です
上の左の写真(図3.3.22)は、USS Permit SS178のSJレーダーアンテナの裏側で、Mare Island Naval Shipyardでのオーバーホール後の1943年1月12日に撮影されたものです(USN photo #19 N 40140)。右の写真(図3.3.21)は、浦博士が北海道沖で発見した残骸のビデオからのスナップショットで、このアンテナの多くの特徴が見られ、この残骸が第二次世界大戦中の米国の潜水艦であることを証明するものです。ただし、1944年末にはアメリカ艦隊の潜水艦はすべてSJレーダーを搭載していたので、この残骸がUSS「Albacore」SS-218であることの決定的な証拠にはなっていません。アルバコアが失われた当時は、古いSボートでさえ、SJレーダーを持っていました。これはSJレーダーアンテナの初期型で、1945年初頭からSJ 1と呼ばれる最新型が配備され、金網のアンテナが大きくなり、性能と信頼性が大幅に改善されました。
図3.3.22 ガトー級潜水艦に取り付けられたSJレーダー
(6)第一次調査を終えて
帰港後、岸壁でNHK、函館新聞、北海道新聞から取材を受けました。その結果、NHKニュースの地方版、および二社の新聞社の記事として掲載されました。記事については6章および付属資料をご覧ください。
また、調査を終えて帰港した際に、当時潜水艦の沈没を見たという男性が岸壁まで来られ、話を伺いました。話の内容は、はっきりしているのですが、つじつまが合わないところがあり、残念ながら参考にはなりませんでした。
図3.3.23はROVを回収後に撮影した記念写真で、ROVを無事に回収でき、Albacoreを発見したことで、安堵しています。前列右端が佐々木船長です。
図3.3.23 船上での記念撮影
3.4 第二次調査
計画延期の途中から、小型のROVでの調査は困難を極めることが分かっていましたので、大型(実際に使ったのは中型)ROVを使った第二次調査を行うことを計画していました。第一次調査から大型ROVを使わなかったのは、大型ROVは漁船からは展開できず、相当する大きさの支援船が必要だからです。その用船費は高額であるので、時間のかかるMBES調査を漁船でおこなって経費を節減しようと考えたからです。第一次調査で艦の位置が確定していれば、一日の大型ROV調査で結果をだすことができるはずです。
2020年以前より、タキオニッシュホールディングス株式会社(社長鈴木敏夫様)にご協力をお願いし、ご快諾を得ていました。第一次調査で予定通り位置が確定したので、さっそく第二次調査に向けて準備をいたしました。
ROVや船の準備、海域の漁業活動、海況予測などを検討し、10月2日に調査を実施することに決めました。潮流の弱い小潮の時期です。船はタキオニッシュホールディングス社の傘下である海洋エンジニアリング株式会社(社長鬼頭毅様)の第八開洋丸、ROVはSAAB社製のCougarです。調査日前日に函館港を出港し、調査日の夕刻に帰港するという強行軍で臨みました。
実施にあたり、海洋エンジニアリング株式会社技術部の勝野遊様をはじめとする乗組員の方々にお世話になったことをここに記し、改めて御礼申し上げます。
ニコニコ生放送は、10月2日早朝から始めました。
https://live.nicovideo.jp/watch/lv336612796
図341 ニコニコ生放送の開始画面
なお、非日本語圏の視聴者が調査作業を理解できるように、同時通訳を行いました。
9時間4分の放送で
参加者:28,144
コメント:9,076
とても良かった:96.2
よかった:2.7%
という結果を得ました。
また、1.4で記述したようにACADEMISTでクラウドファンディングをおこないました。
https://academist-cf.com/projects/265/comments?lang=ja
最終的には、216名の支援者より2,106,300円の支援を得ました。
(1)使用機器と作業
1)第八開洋丸:海洋エンジニアリング社所属
全長:46.61m
幅:8.00m
総トン数:272トン
図3.4.1 第八開洋丸
2)ROV Cougar XT
(SAAB社製、海洋エンジニアリング提供)
全長:1.515m、
全幅:1.0m、
全高:0.79m
重量:409kg
最大前進速度:3.2knots
最大潜航深度:2,000m
INS(Inertial Navigation System):Rovin Nano(ixblue)
図3.4.2 ROV Cougar
3)SSBL測位装置:
μPAP (Kongsberg Maritime社、海洋エンジニアリング提供)
4)MBES(Multi-Beam Echo Sounder):
Kongsberg EM(第八開洋丸備え付け)
図3.4.3は第八開洋丸の甲板上に設置されたROVと着水揚収のために配置された機器類です。図3.4.4はケーブル類などを示しています。
ROVは、図3.4.6に模式的に示されるように、ケージ(かご)に入れられて、海底に降ろされます。ケージとウインチを繋ぐゲーブルは一次ケーブルとよばれ、ROVに電力を送りビデオ情報や運転指令をやりとりする線が入っています。また、海面から吊り上げるために、必要な張力を受け持つ強度メンバーが入っていて太く長いものです。
ROVを格納したケージが目標位置近くに到達すると、ROVはケージに巻かれている二次ケーブルを伸ばしながら発進し、調査対象に接近して調査をおこないます。二次ケーブルは、多大な張力を受け持つことがないので、一次ケーブルに比べて細く、軽く柔軟性に富んでいるので、ROVの移動は容易になります。また、間にケージを挟むことで、水上の母船の動揺がROVに直接伝わらないために、安定した観測が可能です。
第八開洋丸には、DPS(Dynamic Positioning System)が搭載されているので、少々の風や波や潮流があっても、アンカーを打つことなく一点に留まることができます。
図3.4.3 甲板上の装置類。大きな一次ケーブルウインチとROVに繋がる鎧装一次ケーブル。図341のブリッジの前側に海から見たROVとクレーン装置が見えます。
図3.4.4 ケージに取り付けられた二次ケーブルと巻き取り装置、およびROV正面のカメラ類とマニピュレータ
図3.4.5 ROVの展開の模式図。ケージは魚釣りのおもりの役目もしています。
ROVの準備や操縦は、海洋エンジニアリング株式会社の乗組員がおこないます。操縦者は操縦コンテナ内で操作をおこない、指令は、ブリッジの後ろの部屋から、船長から母船の状況を聞きつつ、操縦者にROVの行動を指示します。私たちは、司令の傍にいて、司令に調査したい場所への移動や、カメラの向きやズームなどの依頼をします。図3.4.6は、ブリッジ後方の部屋にしつらえられたDisplayの様子です。6つのDisplayがROVからの映像、ソナー画像、SSBLやMBESのデータを表示します。
図3.4.6 ブリッジ後部の司令室
(2)MBES(マルチビームソナー)調査
2022年10月1日夕刻に函館港を出港した第八開洋丸は、2日朝、現場海域にてまず、MBESによりAlbacoreを再確認し、第一次調査と状況が同じこと確認しました。図3.4.7は反射強度を示しています。5月の調査では反射強度を計測していなかったのですが、今回はMBES調査の際にリアルタイムで反射強度のデータを見ました。その結果、これまで不陸として見えていなかった艦尾側の先に、強い反射があることが分かりました。
図3.4.7は、反射の強さを色で表しています。色が白いところが反射の強いところです。ちょっと見にくいのですが、青の点線は、前回も今回も不陸として見えているAlbacoreです。赤い点線で囲った範囲が比較的強い反射があるところを示しています。第一次調査で見えていた艦尾部の不陸の後ろ側に強い反射があり、そこに何かがが散らばっているか、埋まっていることが推測されました。
青い実線は、後にROVで確認された艦尾部分です。前方破断点から約60mの長さに渡っていることがわかります。その後ろにさらに15mぐらいの長さの物体が海底面下にあるようです。すなわち、艦の前端20mが破壊されて失われ、その後ろの約75mが一体として残っていると考えられます。
図3.4.7 MBESで計測した、海底からの音波の反射強度
(3)ROV調査
Albacoreの真上で、献花をしたのちに、08時18分40秒、ROVは着水し、潜航を開始しました。海底に到着後、一旦引き上げてケーブルを調整して、09時34分56秒に再投入しました。
5月の調査を踏まえ、まず船橋を目指しました。潮と風を勘案してAlbacoreの東側から図3.4.8のようにROVを進ませました。
図3.4.8 最初のアプローチ。矢印は最初のアプローチの方向。星印の所に図3.4.9の構造物がある。黄色い縦の線は、そこに浮きのついた綱などの漁具が存在していた場所。
しばらくいくと、図3.4.9のような艦を構成する構造部材の一部と思われるものが、海底にありました。規則的に並んだ孔は、図3.4.10ような空気抜きの孔と思われます。あるいは肋板のような構造部材で、そこに軽目孔があいているのかもしれません。いずれにしても、Albacoreの一部であると思われます。
それを越えてさらに西に進むと、浮きを付けたロープが水中をあちこち走り、漁網も見えました。その上を越えて西に進むのは危険と考えて、漁具に沿って南下し、ついで若干浮上して艦を乗り越え、西側(左舷側)に回り込みました。
図3.4.9 艦橋から離れた海底に落下していたアルバコアの外板と考えられる残骸。左図の赤丸のような軽め孔があいていた。あるいは、肋板のような構造部材の軽目孔かもしれない。
図3.4.10 構造部材に開けられた孔。艦首部および潜水舵の後ろに並んでいる。
以後、13時40分まで調査を続けました。残念なことに、風が強くなり、午後から海況が悪くなることが予想されていたので、調査を打ち切り、ROVを揚収することにしました。
3.5 撮影されたAlbacore
撮影したビデオのクリップを示し、それがAlbacoreのどの部分であるかを解説します。
図3.5.1は、撮影された位置と撮影方向を示しています。
図3.5.1 ビデオからクリッピングした画像の撮影位置。推定位置なので、必ずしも正確でないことに注意してください。矢印内の番号は、本節の1)から14)の番号に対応しています。
1)左舷艦橋側面と手すり
図3.5.2は艦橋の左舷上部デッキの後方を側面から見たところです。四角く窓が開いているのが見えます。窓の間の柱は、生物が付着していて、太く見えています。その上に手すりがあります。図3.4.3は、沈没以前の写真および水中写真に構造物を書き込んだもので、左の写真の黄色枠のあたりを横から撮影しています。形状は、よく一致しています。ただし、写真にある垂直梯子は脱落しているのか、見当たりません。
なお、艦の周りには、多くのタラが生息していました。図3.5.2の中央に一尾見えます。
図3.5.2 艦橋後部と手すり
図3.5.3 写真との対応。左図の□の部分を横から見ている。左図は2.5.4と同じ
2)艦橋後部と手すり、照明台座
図3.5.4は、図3.5.2の右奥側、すなわち艦橋後部の右舷側を上方から見た写真です。角で曲がった手すりが見えます。図3.5.3には、手すりの上に二本足の鉄筋でできたようなものが立っていますが、それも図3.5.4に見えています。その内側に潜望鏡の支持構造部材の基部があります。図3.5.3の写真には、そこにサーチライトが取り付けられていますが、図3.5.4ではサーチライトは失われていて、その台座のみが残っているのが見えます。
図3.5.4 艦橋後部右舷側の手すり、潜望鏡支持構造、サーチライトの台座など
3)低周波ループアンテナ
二つの潜望鏡の間には、ドーナッツ状の低周波ループアンテナがついています。図3.5.5は、わかりにくいのですが、中央部分に生物に覆われて白く写っています。右に立っているのは第二潜望鏡です。これを見ると左側の第一潜望鏡は、ループアンテナの上のところで、上部が失われています。それとともに次節で述べるSJレーダー(図3.3.21参照)の柱が外れて前方にかしいでいます。
このループアンテナに当初は気づかなかったのですが、米国の指摘によりここに存在することがわかりました。
図3.5.5(1) 生物に覆われたループアンテナ。ほぼ横側から見ているので直線状に白く見えている。図3.5.5(2)を参照して位置を確かめてください。
図3.5.5(2) 二つの潜望鏡の間に取り付けられたループアンテナ。その手前に立つのがSJレーダーの支柱
4)SJレーダー
第一次調査で確認されたSJレーダーは、図3.5.6のように外観されます。図3.3.21は右舷側から至近距離で撮影されていますが、図3.5.6は左舷側からやや離れて撮影しており、レーダーそのものの形ははっきりしませんが、支柱の様子がみてとれます。潜望鏡に並立していたのが外れて、前方に傾いでいる。
図3.5.6 SJレーダーとその支柱
5)艦橋前部の張り出し
図3.5.7は、艦橋の前にある張り出し部で、その上に機関銃座があります。この下側にいくつかの特徴的な形状があるはずなのですが、残念ならが撮影できませんでした。また、向こう側に回り込もうとしましたが、漁具に阻まれ、断念しました。
図3.5.7 艦橋前部の円形の張り出し部分。
6)機関銃台座
図3.5.7の中央部にあるのは機関銃の台座で、図2.5.1の写真でよくわかります。図3.5.8は台座の頂部です。
図3.5.8 艦橋前部の張り出しに設置されている機関銃の台座。図2.5.1ではこの上に機関銃が乗っている。
7)クリート
図3.5.9は、左舷側甲板上で艦橋の少し前にあるクリート(係船金物)が写っています。水抜き孔も見えています。図3.5.10の右側は、ヨット用の金物ですが形状はほぼ同じです。左側は、模型上に据え付けられたクリートを示しています。水抜き孔もほぼ対応しています。このクリートを基点として、艦橋の位置が分かります。残念なことに、クリートの近くの甲板は破壊されていて、そこにあるものがよくわかりません。外板は、水抜き穴のある局面部分の下が破壊されていることが見えます。
図3.5.9 左舷側にあるクリート
図3.5.10 クリートの説明と模型上のクリート
8)艦橋横水抜き穴と三本足のスタンション
図3.5.11は、図3.5.10より少し艦尾にいった部分で撮影した舷側上部の水抜き穴と甲板上のスタンションです。このスタンションは左右に斜めの支持材がついています。図2.5.1や図2.5.2では、片一方に支持材のついたスタンションが見えるのですが、両方についたものは見当たりません。その後に取り付けたものではないかと考えられます。
図3.5.11 水抜き穴と右側上部にある三本足のスタンション。周囲にはタラが多く生息していました。
9)ハッチ
図2.5.2のデッキ上にハッチが見えます。図3.5.12はそのハッチです。図中の右上にインポーズされているROVのHeading角が71.7度であることからハッチの後方から艦首の方向を見ている写真になっています。すなわち、艦尾側がまるくなっているので、図2.5.1と形状が対応しています。なお、カメラにはパンチルト装置がついているので、カメラの方向はHeading角とは必ずしも一致しないことに注意してください。
図3.5.13の青図や図2.4.1の同形艦の写真を見ると、艦の中央線状に2か所、このようなハッチが見受けられます。図3.5.12のハッチは図3.5.13の前方のハッチであると考えられます。後方のハッチは図3.5.15のポールの前に見えています。
なお、図2.5.2では、艦橋のすぐ後ろの中央線から右舷側に少しずれた位置に開いたハッチが見えています。
図3.5.12 甲板上のハッチ
図3.5.13 甲板上の二か所のハッチ
10)後部デッキ
図3.5.14は後部デッキを上から見た図です。比較的よい状態が保たれています。図3.5.12や図3.5.15にも同様の状況が映し出されています。濁りがあるために、遠目がきかないのが残念です。
図3.5.14 後部甲板の状況
11)後部デッキ上のポール
図3.5.15は、後部デッキの中央に立つポールです。これが何かは、よくわからないのですが、手すりのスタンション(取り付け金物)か、通信用の電線を張っていた柱ではないかと思われますが、よくわかりません。アメリカからの情報によれば、後部にアンテナポールはないので、スタンションではないかということでした。しかし、形状がスタンションではないように見受けられます。この位置には、デリック(一種のクレーン)ポストが立っていたのですが、沈没時にデリックポストが立ったままであったとは思われません。図3.5.16の模型には、この位置にポールが建てられていて、架空線のための柱である可能性が高いと思います。
ポールの前側にハッチが見えます。
図3.5.17は、ポールの周辺まで広く見た写真です。右舷側の後部のデッキが砂で覆われ始めているところが見て取れます。
図3.5.15 中央線上に立つポールとその前方のハッチ
図3.5.16 模型上のポールとその後ろにある魚雷用のハッチ。魚雷用のハッチ部分は海底土に覆われてしまっていて確認できていません。
図3.5.17 砂に覆われるポールの右舷側
12)舷側に取り付けられた手がかり
図3.5.18の上部中央に写っている線状のものは、舷側に取り付けられた手がかりであると思われます。図2.3.1の青図の立面図のデリックの位置に二つ描かれています。
図3.5.18 舷側の手がかり
13)砂に埋もれかかった右舷後部
ポールの右舷側にROVを回り込ませ、海底面と接する部分が図3.5.19です。左側にいるタラよりもさらに後部は砂に埋まっています。
図3.5.19 砂に接する右舷側。舷側はほぼ垂直で、艦が水平に鎮座していることが分かります。
14)魚雷発射管の前部の外板か?
潜望鏡の立つ艦橋のすぐ後ろの部分は、残骸でおおわれています。その上に、図3.5.20のような外板と見られる構造物がありました。そこには、二本のへこみがあります。
Albacoreの艦首には左右に3門ずつ、艦尾には左右に2門ずつの魚雷発射装置が装備され、図3.3.9のように配置されています。その外側の外板の形状ははっきりしないのですが、図2.3.3の模型の写真を参照してください。
図3.5.20 魚雷発射装置の前部であると思われる外板のへこみ
3.6 第二次調査を終えて
台風の接近で、十分な調査時間を取れなかったものの、沈没艦の主要部分を撮影することができました。マリンスノーや生物が多く、濁っていて見通しが悪いこと、漁具がからんでいること、など困難な状況にありながらも、安全な調査をおこなうことができました。また、同時通訳付きのニコニコ生放送に多くの声援を得て、調査は無事に終了しました。ご支援を賜った方々、ご協力くださった方々、ボランティアの方々に深くお礼申し上げます。
図3.4.22は船の方々とともに集合写真を撮影しました。
図3.6.22 ROVの横での記念撮影
4.アルバコアであることの確信
以下に確認された事実を列挙します。
1)5月にMBESで調査した海域には、他に沈没艦船はありませんでした。
2)2.6節で述べたように、浮遊物に明らかにAlbacoreのものであるというものがありました。
3)ROV調査の結果、潜水艦であることは明らかです。また、全体的な形状はAlbacoreの形状と矛盾がありません。
4)図3.4.2の艦橋の形状は、ガトー級の潜水艦の特徴を表しています。
5)艦橋上部の手すりの配置、サーチライトの台座は、Albacoreの写真と一致します。
6)図3.3.21のSJレーダーは、Albacoreに取り付けられていたはずno
ものと一致し、米国の潜水艦であることの証拠です。
7)艦橋前部の円形の張り出しとその上の機関銃台座は、Albacoreの写真に一致します。
8)後部甲板上に立つポールについては、対応する情報がなく、不明です。
9)撮影されたビデオ画像から、Albacoreでないといえるものはありません。
10)この周辺海域にガトー級の潜水艦が他にも沈んでいるという情報はありませんし、可能性もありません。
以上のことから、発見された潜水艦は、Albacoreであると断定できます。また、次章で述べるように、米国政府機関が私たちの発見した沈没潜水艦をAlbacoreであると認定しました。

























