12・テーパーヘリカルギア1個では回転駆動を補完出来ない 2008-08-20 13:01:12 | Weblog もうお気付きでしょうが、 円錐型はすば歯車1個でそれに噛み合う様に、はすば歯車2個を、どの様に配置しても、変速をする為に、はすば歯車をスライドさせた時、歯車どうしの干渉によりスライド移動が出来ず、回転駆動を補完することが出来ない。
11・もしフォーミュラー1に搭載すれば、・・トラックは。 2008-08-08 15:39:02 | Weblog F1に搭載すると、構造的には、まずクラッチは要らない、変速比制御は、テーパーヘリカルギアの無段階の位置の変化のみ、1次元の変化であるので、制御としてはそう難しい事は無い、また、絶対変速比で有るので、変速制御する側の、絶対支配で行われる・・ドライバーの意志「コンピューター制御ならそれ」に忠実に従う、勿論エンジンブレーキも効かそうとすれば効く・・その他想い巡らせて下さい、何でも可能に成ってくる・・また構造上ミッショントラブルは考え難い・・面白いですねー、何処まで行けるやら・・・・・。 トラックの場合は・・やはり100万㎞以上の走行距離に成るので、また安全のため、使いやすさ、その他諸々を考慮し・・クラッチは有った方が良いかと思われます、・・その他は、F1と全く同じ事が出来、色々な、・・トラックに有ったコンピューター制御が全く自由に出来ます。
10・クレーンに使用すれば・・・ 2008-08-08 15:34:07 | Weblog 例えば天井クレーンに別なものが有ったら・・・今は大体モーターに歯車式の減速機を直結し、正逆転のスイッチが有るだけで、実に単純な構造の物を上下、東西、南北、3組で操作している。詰まり、モーターに歯車式の減速機を直結している事は、絶対安全が絶対条件で有るが故で、スリップを伴う何れの無段変速機も使用出来無い・・・つまり、インチング、ON,OFFのみで行うので、負荷の変動が瞬間に行われるので、高能率高性能は、これ以上望めない。・・・・そこで・絶対スリップの無い無段変速歯車機構を使えば・・・モーターと歯車式減速機の間に・・色々な華が咲き競いて・・の変速機を使えば、円錐型はすば歯車の所で変速比4/3では太陽歯は0回転で、絶対0、ロック状態・・モーターの回転停止に係わらず・・・だから0発進、0停止が出来る・・故に少なからず高速運転ができる・・
8・テーパーヘリカルギア展開図(歯数8の場合) 2008-08-08 15:17:00 | Weblog 円錐型はすば歯車の歯すじの平面展開図です、円筒形のはすば歯車の歯すじの展開図は直線になるが、円錐面に15度のはすば歯を刻めば其の歯すじは、曲線になる、その為円錐型はすば歯車と円筒形はすば歯車は、ぎくしゃくせずに滑らかに噛合い、其の変速比は、スライドするはすば歯車の歯巾の中央で決定される。
7・無段変速歯車機構・・主要部・・・雑華厳浄 2008-08-08 15:04:03 | Weblog 1-1,2及び3-1,2が円錐型はすば歯車で、6,7が2対の円錐型はすば歯車の間をスライドしながら回転駆動の補完を受ける歯車で、8は6,7の位置を決めるホルダーである、4,5の歯車は互いの円錐型はすば歯車を同期逆回転に連結する歯車である。・・・円錐型はすば歯車の小端部と大端部の比が2/3とすると、変速比は大体2/3から3/2の間で無段階に変化する。・・・遊星差動歯車の遊星歯車と太陽歯車の歯数が同一とする。(太陽歯車より遊星歯車を小さくする方が実用的でしょう)・・・エンジンorモーターの出力軸と遊星支持腕とを直結し、その遊星支持腕の軸と円錐型はすば歯車1-1とをほぼ同一回転数になるように歯車で連結し、又遊星支持腕と同一回転方向に成り、ほぼ同一回転数に成るように円錐型はすば歯車3-2と遊星差動歯車の内歯車を歯車にて連結すると、・・遊星支持腕と内歯車の回転数比は2/3から3/2の間に無段階に成り、そこで・・・エンジンorモーターの出力軸と遊星差動歯車の太陽歯車(変速機の出力軸)の変速は・・・+3/2から0(絶対0、ロック状態)それから-2/3・・・に無段階に成ります・・・・・・
6・テーパーヘリカルギア・・・新しい華 2008-08-08 14:53:18 | Weblog この新しい華こそ、この挑戦の精華です・・・その構造を記します・・・・記入してない部分は御身で決めて下さい。 円錐型はすば歯車(2対4本)、テーパー角(3度、約1/10)、歯車歯型(標準)、歯形基準平面(歯直角)、歯形(並歯)、モジュール( )、圧力角(20度)、歯数(2×6=12・小端基礎歯数24大端基礎歯数36)、ネジレ角(15度)、ネジレ方向(左右で1対)、・・・ 円錐型はすば歯車に噛合うはすば歯車(1対2個)、歯車歯形(標準)、歯形基準平面(歯直角)、歯形(並歯)、モジュール( )、圧力角(20度)、歯数(39)、歯巾( )、ネジレ角(15度)、ネジレ方向(左右で1対)、リード( )、・・・ これなら非常に滑らかに駆動を補完しながら回転する。
5・全体の構造・・・雑華厳浄 2008-08-08 13:53:23 | Weblog テーパー角3度ほどの円筒形に近い円錐形を円周方向に、歯の干渉を防ぐ為に歯2山以上の巾に偶数等分割し、1つ置きに、モジュールが変化しない同一形状の、はすば歯形を刻み、他方は空間にした円錐型はすば歯車を、2個1対とし、互いに同一回転数にて、噛合駆動を補完しながら、逆回転する様、歯車にて連結同期する、其れに噛合いながらスライドする、1対のはすば歯車も、逆回転する様連結同期し、スライドする事に依り円錐形はすば歯車の、噛合う径の変化に因り、無段階に回転数の変化を得、それを、差動歯車機構に組み込み、より広い範囲の変速比を得る。 ・・・・・・・・駆動は全て歯車のみ、他は一切使用していません、・・・ テーパーヘリカルギア2セット4本、変速比制御ギア2個、遊星差動歯車1セット、差動歯車と変速歯車を連結する歯車6個、・・計12個+遊星差動歯車・・で本体は完結します。 PT.No・・4045573・・・・・名称・・無段変速歯車機構・・ 特許流通促進事業・・・特許流通データベース・・ ・・・・・・ライセンス情報番号・・L2008002238
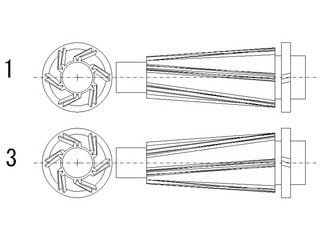
4・創造への挑戦・・逆回転により駆動の補完 2008-08-08 13:07:27 | Weblog 特許明細書の一番要な所を・・・オーバーラップ部分を除けば、円錐型はすば歯車1の歯すじは回転駆動を初める時であり、円錐型はすば歯車3の歯すじは回転駆動を終わる時である、この時円錐型はすば歯車1及び3の歯すじは対称の位置にあり、又この時円錐型はすば歯車1に噛合っている歯車6と歯車7は直接噛合っている事に因って同一回転数で逆回転しているから、常にその歯すじは対称の位置にある、従って円錐型はすば歯車1と歯車6は滑らかに確実に噛み合う。(次においては)、円錐型はすば歯車1が歯車6の回転駆動を終えて、円錐型はすば歯車3が歯車7に回転駆動を初める時の各歯すじの図であり、(上図)に於いて説明したのと同等の理由で滑らかに確実に噛み合う、このようにして逆回転しながら、回転駆動の補完移動が、確実且つ速やかに行われ滑らかに全歯車が回転する。
3・新思考・・ 2008-08-07 19:23:52 | Weblog この図で理解して頂きたい、2-2の歯車が噛合い始めた時、2-1の歯車が噛合いを終る時である。 噛合い駆動を補完しながら逆回転する、1対の(円錐型はすば歯車)の補完の理論図・・・歯車2-1,2-2の同期は同歯数の歯車4,5に掛かり、6-1,6-2の同期は、同歯数の歯車9,10に掛かっている。・・・ もし歯車の変速比が無段階に変化する為には、一方の歯車の歯数は整数でよいが、その時他方の歯数は無理数にの変化が要求される、そこで1個の歯車で無理数の歯数は出来ないので、2個で通常1個の歯車と同等の機能を持つ歯車にすればそれは可能になる。 実際には4等分45度では円錐弧面に同一モジュールの歯形は刻めない。
2・呪縛と、其れからの脱出 2008-08-07 16:07:30 | Weblog 呪縛にかかり、其れから解けないのは何故。 私、むか~し昔・先生に、 歯車で無段変速が、出来ないか、・・教えてもらいに行きました。 先生曰わく、 「歯車には・・不文律・・と云うのがあって・・なかなか難しい話ですよ・・しかし・・その不文律の意味が何か、・・それをしっかり理解出来た上で、・・其れでも創ると云うなら・・それも面白いですけど・・どうしますか?」 「有り難う御座います、先生・・俺面白い事大好き・・まずは不文律ですね・・先生有り難う御座いま~す。」
1・現在・何故・存在し無いのか・・ 2008-08-07 14:26:45 | Weblog 200年前頃は余り無段変速は、必要でなかった、色々な機械装置が出来てきて、その様な機械装置をより高性能にする為に無段変速装置が必要に成ってきたが、歯車で其れを行うには良いシステムを想い至らなかった為、現在有る様な様々なシステムが発達してきた。・・・・しかし、もし歯車式無段変速装置が出来たら、歯車の持つ潜在力に因り、現在でも変速装置として最も尊重されると想われます。 然し、良いシステムを想い至らなかった、そこで、昔の権威ある人物が考た。・・それとは・・歯車で無段変速装置は出来ない・・と。 しかし、明文化出来ない・・そこで権威在る人が不文律として、機構学を考える人々の間で、ほぼ常識として流布させた・・・不文律を受け入れた人々も、自分たちの無力さを認識せずに済むから、そう認めたのでしょうね。