








1月22日にH-IIBロケットで打ち上げられた宇宙ステーション補給機(HTV)2号機、愛称「こうのとり2号機」は、今夜国際宇宙ステーション(ISS)とランデブーし、ロボットアームで把持された後、ドッキングします。
ロボットアームによるキャプチャと、ISSとのドッキングの様子は、JAXAの特設サイトから中継で見ることができます。
これまでの流れ:
1月22日14時37分 種子島宇宙センター第2発射場からH-IIBロケット2号機で打ち上げ。
同日14時53分 HTV2分離。
同日22時時13分 最初のランデブー用軌道調整マヌーバを完了。
1月23日0時26分 初期高度調整軌道に到達。
1月26日6時26分 第1回高度調整マヌーバを実施。
1月27日11時20分 第2回高度調整マヌーバを実施。
同日14時22分 第3回高度調整マヌーバを実施。
同日15時8分 接近開始点(ISSの後方5km)に到達。

同日17時25分 接近再開。
同日18時47分 R-bar開始点(ISSの下方250m)に到達。
同日19時20分 R-bar開始点を出発。



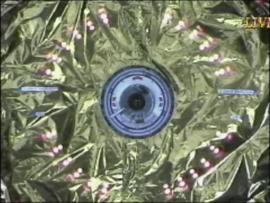
モニターの□の枠内にHTV2が収まったとき、10mに到達となります。

同日20時32分 バーシングポイント(ISSの下方10m)に到達。


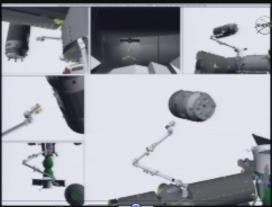
キャプチャの瞬間のライブ映像はなく、このモニターでロボットアームとHTV2の位置関係がわかります。
キャプチャの瞬間を見守るHTV運用室の様子です。

同日20時41分 ISSロボットアーム(SSRMS)でHTV2をキャプチャ。

喜ぶHTV運用スタッフの様子です。

キャプチャ後、ロボットアームでHTV2を回転させる作業を行い、30分程度で完了しました。



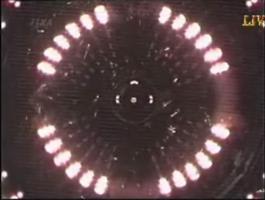
HTV2のハッチ部のLEDライトの反射光が真中にあれば、まっすぐ対面していることになります。これを確認しながらドッキングを行います。
ドッキングに向けた準備が始まりました。

1時間半毎にやってくる朝です。


ロボットアームによる接近が始まりました。

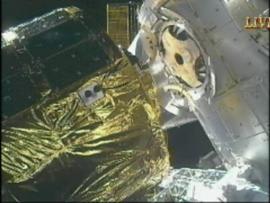
ISSとHTVが接触!

ボルトで固定する作業が行われています。ドッキングは最終段階です。
映像はJAXA/NASA
ロボットアームによるキャプチャと、ISSとのドッキングの様子は、JAXAの特設サイトから中継で見ることができます。
これまでの流れ:
1月22日14時37分 種子島宇宙センター第2発射場からH-IIBロケット2号機で打ち上げ。
同日14時53分 HTV2分離。
同日22時時13分 最初のランデブー用軌道調整マヌーバを完了。
1月23日0時26分 初期高度調整軌道に到達。
1月26日6時26分 第1回高度調整マヌーバを実施。
1月27日11時20分 第2回高度調整マヌーバを実施。
同日14時22分 第3回高度調整マヌーバを実施。
同日15時8分 接近開始点(ISSの後方5km)に到達。
同日17時25分 接近再開。
同日18時47分 R-bar開始点(ISSの下方250m)に到達。
同日19時20分 R-bar開始点を出発。
モニターの□の枠内にHTV2が収まったとき、10mに到達となります。
同日20時32分 バーシングポイント(ISSの下方10m)に到達。
キャプチャの瞬間のライブ映像はなく、このモニターでロボットアームとHTV2の位置関係がわかります。
キャプチャの瞬間を見守るHTV運用室の様子です。
同日20時41分 ISSロボットアーム(SSRMS)でHTV2をキャプチャ。
喜ぶHTV運用スタッフの様子です。
キャプチャ後、ロボットアームでHTV2を回転させる作業を行い、30分程度で完了しました。
HTV2のハッチ部のLEDライトの反射光が真中にあれば、まっすぐ対面していることになります。これを確認しながらドッキングを行います。
ドッキングに向けた準備が始まりました。
1時間半毎にやってくる朝です。
ロボットアームによる接近が始まりました。
ISSとHTVが接触!
ボルトで固定する作業が行われています。ドッキングは最終段階です。
映像はJAXA/NASA






※コメント投稿者のブログIDはブログ作成者のみに通知されます