ABSTRACT
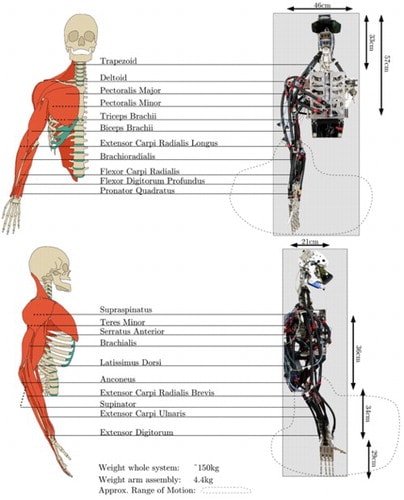
This paper describes the construction and design decisions of an anthropomorphic musculoskeletal robot arm actuated by pneumatic artificial muscles. This robot was designed to allow human-inspired compliant movements without the need to replicate the human body-structure in detail. This resulted in an mechanically simple design while preserving the motoric characteristics of a human. Besides the constructional details of the robot we will present two experiments to show the robots abilities regarding to its
dexterity and compliance.