








SMO 4Kを搭載した95X V3を飛ばしてみました。
撮影動画を見たらファイルのタイムスタンプが今日じゃ無い!!
液晶ついてないし設定どうするのかと思ったらinsta360 のアプリでWiFi接続できるんですね。
接続したら自動的にフォームが更新されて、時計もあったようです。



先日、X-KNIGHT360にGPSチップを付けましたが、BETAFPV 95X V3にも付けられるんじゃないかと同じGSPチップをポチリました。
今回もep-modelsさんのページで通販しました。
TBS M8-2です。

95X V3のFCは公式ページに写真がありました。
このRx1とTx1が使えそう。
公式ページにこんな記述が。
UART1はスペア?
そういえば、BETAFLIGHTのポート設定にUART1は出てきていませんでした。
半田づけしたはいいもの、UART1を使うにはどうしたものかとネットを探していると、こんなページを見つけました。
中国語ですが、95X V3にSMO 4Kを接続してプロポからカメラを操作する改造のようです。
写真のRx1とTx1を使っていて、PINIO1とPINIO2を使っているようです。
resourceコマンドで指定しているpinがRx1とTx2を表していそうなので、CLIコマンドモードで以下を実行しました。
事前にdump allして設定をファイルに記録しておき、
resource SERIAL_RX 1 A10
resource SERIAL_TX 1 A09
save
これをするとBETAFLIGHTのポート設定にUART1が出現したので、GPSに割り当てます。

GPSをONにしてプロトコルをUBLOXにします。

GPSレスキューも設定しました。

なかなか衛星捕捉しないけど、これで合っているのかな。




カメラ本体以外の付属品はUVフィルタとND16フィルタ。

あと謎の背面カバー。違いは95X V3用のマウントが付いてないです。(下部中央)

まずカメラを固定します。95X V3のこの部分のボルトを外してSMO4Kの出っ張りを押し込みます。
ドローン側の溝の間隔が出っ張りより狭いので、やさしく捻じ込んでください。
そしてボルトを締めます。

次に電源ケーブルを接続しました。
コネクタがどっち向きが正解か老眼には厳しかったのですが、青ケーブルが上が正解のようです。

SDカードはこちら向きに挿します。

電源ボタンオン!! 下図の右のボタン。

UVフィルタをハメた状態。これって固定はされなくてキュッとハメるだけですね。
ドローンが落下したら吹っ飛びそう。
録画ボタンを押すと、赤が点滅しました。

いきなりSMO4Kを搭載して飛ばしてもカメラを破壊しそうなので、しばらくフライト練習をします。

飛ばしに行くのが遠いので95X V3用のバッテリーは8本、X-KNIGHT360用のバッテリーは7本用意しました。
ただ、昨日はX-Wingで遊んだり2時間くらいで強風になって切り上げたので使わなかったバッテリーが沢山。
帰宅して充電器でストレージモードで放電していますが時間がかかります。
じゃ、ドローンにつけてモーター回したほうが早くないか?
と思い、アイドリングでプロペラ回しているとどれくらいバッテリーを食うのかやってみました。
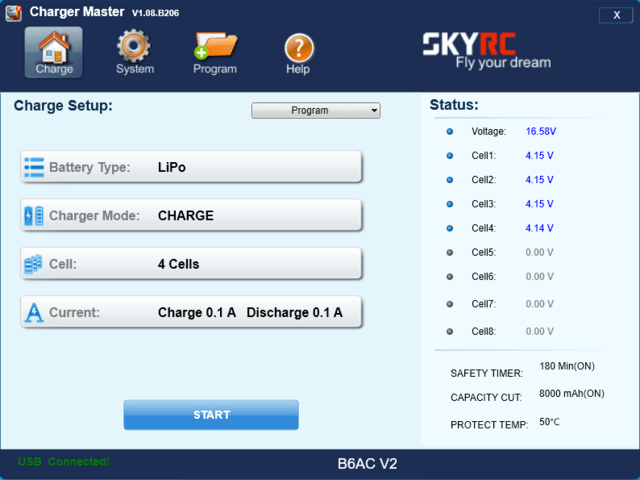
まずフル充電。4.20Vより少し下がっています。
ストレージモードで電圧を落とした状態。3.85Vに揃えられるようです。

フル充電のバッテリーを繋いで、3分間プロペラをアイドリング運転した電圧。
4.15Vなので電圧は0.03V程度下がったようです。アイドリングだとたいして減らないですね。
これでは充電器に任せておいたほうが楽。



BETAFPV 95X V3の初フライトをしてきました。
お店で設定されているモードを確認しないまま飛ばしたら、いきなりアクロモードでビビりました。
でも、これも良いかも。
ひたすらホバリングの練習をしました。
バッテリーは450mAhなので時間を計ってみたら6分位で飛べなくなりました。
その後、風がどんどん上がってしまったのでちゃんとホバリング練習したのは12分位です。
今日は有給休暇を取得して4連休を作ったのに、風が強い日が続きます。