








KKK01の上半身にロボットアームを両手として付けた!


③左手を付けた




KKK01君がこれでロボットらしくなった!
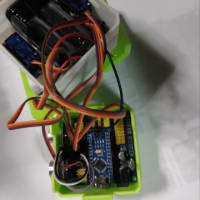
とりあえずの制御は、arduinoのUnoで両手の制御を行いたい
サーボモーター12個の上半身の両手の自由度となる!
①骨組みを作る
②右手から付けた
③左手を付けた
④顔を付けた。

これをKKK01君の上半身に取り付けする!
どうも5cm程度身長が高過ぎだ!
背骨を5cm切りたい✂️!?
⑤身長を5cm程度低くする
腕が抜け落ちるハプニングがあった!


さて、腕を修復して完了
⑥フレンチの車両に積載したKKK01君にドッキング
中々男前なロボット君になったなあ!

KKK01君の姿が出来てきた!
後はマイコンユニットを搭載させて12個のサーボを制御させるロボット君のマイコンユニット選定とプログラム作成へと移行してゆく!
つづく







※コメント投稿者のブログIDはブログ作成者のみに通知されます