少し不安定で、ウインメモリ診断が終わらないで止まるので、初期不良交換交渉、通ったので、今度は、8gb+

BIOS認識OK

ウインメモリ診断OK

スコアはかわりなし
わざと、RAMディスク3.9gb作製し
BIOS認識OK
ウインメモリ診断OK
スコアはかわりなし
わざと、RAMディスク3.9gb作製し
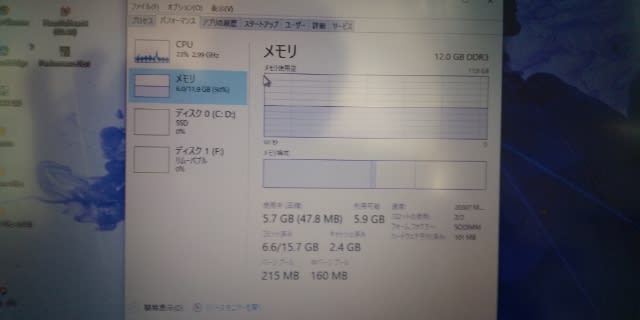
再増設分4gbを実質隔離しました
そして、カーネルを全てメモリ展開し約50%使用済み(実際は4gb隔離し2gbシステム)残り6gbを余力にした。
ウインドウズが欲しがる手動のページンク領域が4gbに満たないのでその範囲で設定し残りをブラウザの一時ファイルにした。
ページングはそもそもいるのか?
64bitOSは4gb以上積めるからアプリもそのつもりで作られてはいる。
しかし32bitアプリをベースにしている具合によっては32bitOSの名残で、4gbオーバー分をスワップするはずだから
少なくとも、システム2gbを除く2gbを1パケとして2パケ相当をRAMディスクに確保して、SSDHDDにスワップしなければ、どうかと考えた。
そもそもwindows10はタイムリーにスワップ管理するらしいから、アプリ側の挙動を無視するかもしれないが、アプリによっては、仮想化領域を指定するものもあるらしいので、32bitアプリが混在する間は、固定スワップを書き換え耐久の高いドライブに指定するのはまだ有効と考えた。