どうも中島です。
今回は冬休みが始まったっことですし先輩に書けと言われたのでブログ更新したいと思います。
ちなみに僕は2台目が間に合わずノード落ちしたのでこの機体はノードまでしか動かしてませんのであしからず(まあ今後も使うと思いますが、、)
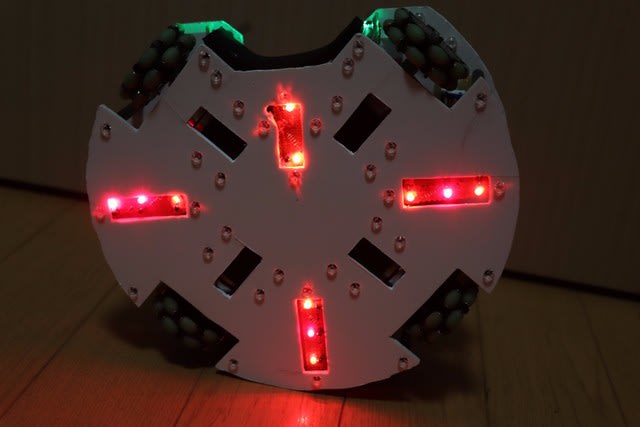
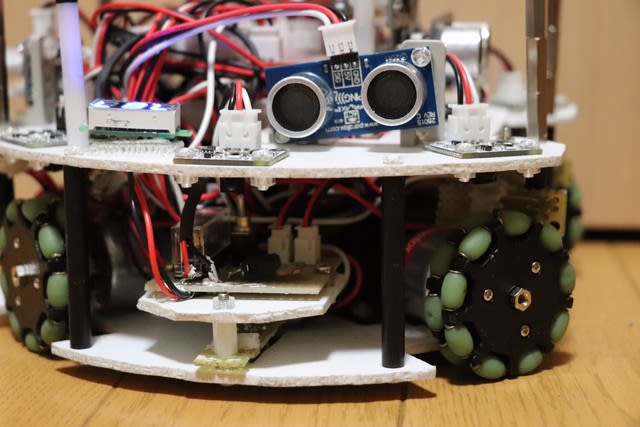
まず機体の外観です


見た目はこんな感じです
次に乗ってるものです
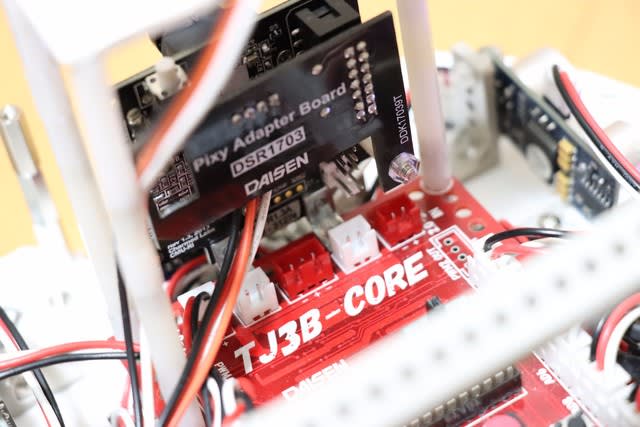
制御系
・Tj3b Core x2
・6ch motor control board
センサ
・ダイセン シングルパルスボールセンサ x8
・parallax PING x4
・ラインセンサ(自作) x4
・捕捉センサ(自作) x1
・トグルスイッチ x1
・HMC6352(方位センサ) x1
・Pixy(cumcam5) x1
・Pixy Adapter board x1
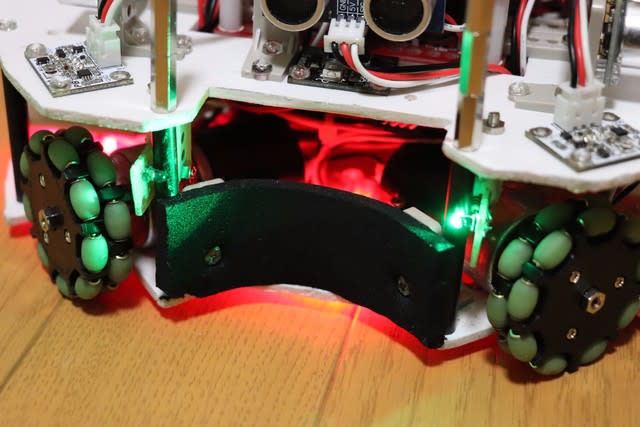
足回り
・ダイセンロボサイトモーター15:1 x4
・プラスチックオムニホイール DOW46P(通称枝豆) x4
バッテリー
・kyPOM K6series 7.4V 850mAh

ぐらいですかね
あと板はすべて低発砲塩ビ版を使っています
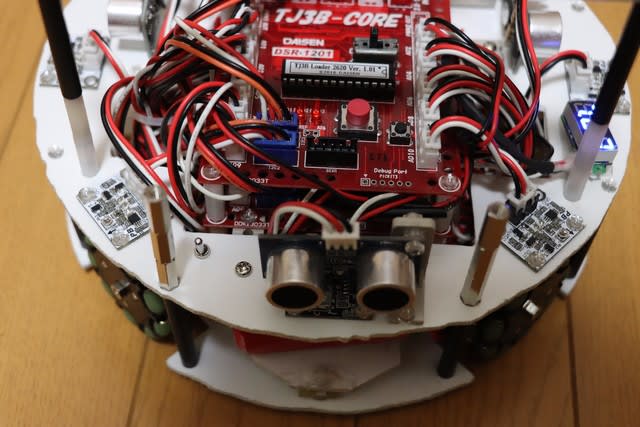
次に設計について
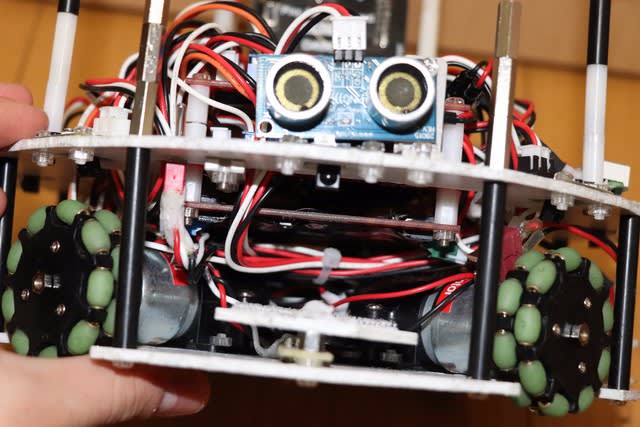
一番工夫した設計はこのTJ3b2枚と&6ch motor control boardを重ねて2段目に宙ずりで固定してろところです

この設計のメリットとしては2段目に2枚TJ3bを横並びに載せると超音波等を置くスペースがなくなってしまいます。
そこでこの設計にすればどうせ触ることのないslave coreを隠して横のスペースが大きくとれます。
しかし、slave coreにつけたケーブルを抜き差しすることが大変なのでそのケーブルを差し替えたいと思うときは一度分解しないといけません。
つまりスペースは取れますがメンテナンス性は少し悪いです。
まあ取り換えることのなさそうなコードを下につければいいと思います(でも割とこのメンテナンス性の悪さに苦しみました
(何も考えずに下のケーブルを決めたからかな))
次にラインセンサです

素子は秋月の、NJL7052を使っています。前に二個右、後、左に3つついており値を平均化してアナログで読んでいます。
正直反応悪いし値あんま良くないです。
アウトオブバウンスをなくせていないので数を増やして論理回路でまとめてデジタルで読むなどしたほうがいいかもしれませんね。
次にボールセンサです

これがこのロボットで僕が一番嫌いな個所です。
まじでこのようにボールセンサを外に露出するにはおススメしないです。
ちゃんとリングにまとめるなどして敵ロボットと当たらない位置に置きましょう。
ノード大会にダイセンの黒いパルスボールで出て試合中にチップ型可変抵抗器が敵ロボットにあたって外れてその試合落としたので
(その相手が勝てる予定だったとこでそのせいで予選リーグ4位で初戦KORRDETと当たってノード3位でした)
ほんとによくないです。やめましょう。
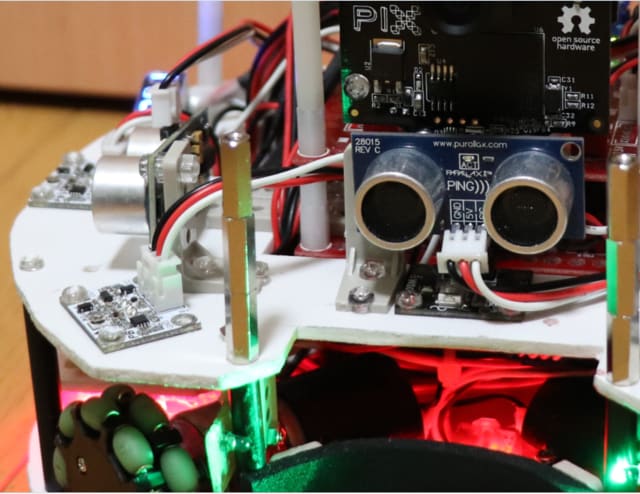
次に捕捉センサです

ここの設計は割と気に入ってます。
前の支柱の外側に捕捉センサを置くことで敵ロボットとできるだけ当たらないようにしています。
捕捉センサは便利ですが壊れやすいので壊れにくいのは大きなメリットです。
次にスタートスイッチです

これはただ単純にトグルスイッチの片側に抵抗をかませているだけなのですが、TJ3B特有の
ボタンの押しミスによりスタートできない
とゆうことがないのでとてもオススメします
その他もろもろです

電源回路をラインの上にユニット化してまとめることで交換を楽にしています。

場所が余った左側にI2Cの増設ポートを付けています。
とても便利です。
最後にPixyの固定はTJ3BにPixy付属のL字金具を使っています。

僕のロボットはこんな感じです。
なんか書きたくなったので書いたのですがお役に立つのでしょうか?
せいぜいオムニに挑戦したい後輩君とかが読んでいただければいいと思います。
では今回はこの辺で
乱文長文失礼しました。誤字脱字は見逃していただけるとありがたいです。
それでは
今回は冬休みが始まったっことですし先輩に書けと言われたのでブログ更新したいと思います。
ちなみに僕は2台目が間に合わずノード落ちしたのでこの機体はノードまでしか動かしてませんのであしからず(まあ今後も使うと思いますが、、)
まず機体の外観です
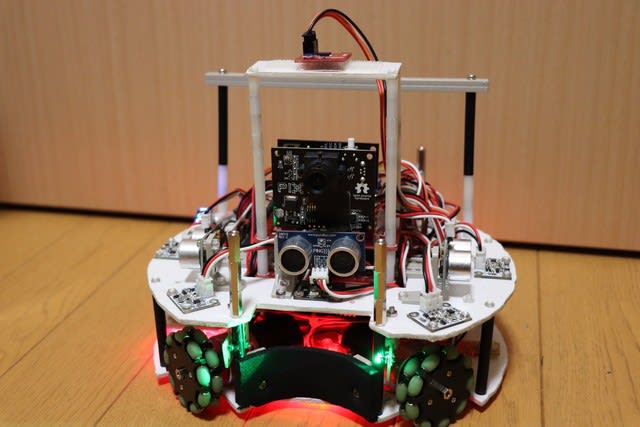

見た目はこんな感じです
次に乗ってるものです
制御系
・Tj3b Core x2
・6ch motor control board
センサ
・ダイセン シングルパルスボールセンサ x8
・parallax PING x4
・ラインセンサ(自作) x4
・捕捉センサ(自作) x1
・トグルスイッチ x1
・HMC6352(方位センサ) x1
・Pixy(cumcam5) x1
・Pixy Adapter board x1
足回り
・ダイセンロボサイトモーター15:1 x4
・プラスチックオムニホイール DOW46P(通称枝豆) x4
バッテリー
・kyPOM K6series 7.4V 850mAh

ぐらいですかね
あと板はすべて低発砲塩ビ版を使っています
次に設計について
一番工夫した設計はこのTJ3b2枚と&6ch motor control boardを重ねて2段目に宙ずりで固定してろところです
この設計のメリットとしては2段目に2枚TJ3bを横並びに載せると超音波等を置くスペースがなくなってしまいます。
そこでこの設計にすればどうせ触ることのないslave coreを隠して横のスペースが大きくとれます。
しかし、slave coreにつけたケーブルを抜き差しすることが大変なのでそのケーブルを差し替えたいと思うときは一度分解しないといけません。
つまりスペースは取れますがメンテナンス性は少し悪いです。
まあ取り換えることのなさそうなコードを下につければいいと思います(でも割とこのメンテナンス性の悪さに苦しみました
(何も考えずに下のケーブルを決めたからかな))
次にラインセンサです
素子は秋月の、NJL7052を使っています。前に二個右、後、左に3つついており値を平均化してアナログで読んでいます。
正直反応悪いし値あんま良くないです。
アウトオブバウンスをなくせていないので数を増やして論理回路でまとめてデジタルで読むなどしたほうがいいかもしれませんね。
次にボールセンサです
これがこのロボットで僕が一番嫌いな個所です。
まじでこのようにボールセンサを外に露出するにはおススメしないです。
ちゃんとリングにまとめるなどして敵ロボットと当たらない位置に置きましょう。
ノード大会にダイセンの黒いパルスボールで出て試合中にチップ型可変抵抗器が敵ロボットにあたって外れてその試合落としたので
(その相手が勝てる予定だったとこでそのせいで予選リーグ4位で初戦KORRDETと当たってノード3位でした)
ほんとによくないです。やめましょう。
次に捕捉センサです
ここの設計は割と気に入ってます。
前の支柱の外側に捕捉センサを置くことで敵ロボットとできるだけ当たらないようにしています。
捕捉センサは便利ですが壊れやすいので壊れにくいのは大きなメリットです。
次にスタートスイッチです
これはただ単純にトグルスイッチの片側に抵抗をかませているだけなのですが、TJ3B特有の
ボタンの押しミスによりスタートできない
とゆうことがないのでとてもオススメします
その他もろもろです
電源回路をラインの上にユニット化してまとめることで交換を楽にしています。

場所が余った左側にI2Cの増設ポートを付けています。
とても便利です。
最後にPixyの固定はTJ3BにPixy付属のL字金具を使っています。
僕のロボットはこんな感じです。
なんか書きたくなったので書いたのですがお役に立つのでしょうか?
せいぜいオムニに挑戦したい後輩君とかが読んでいただければいいと思います。
では今回はこの辺で
乱文長文失礼しました。誤字脱字は見逃していただけるとありがたいです。
それでは