








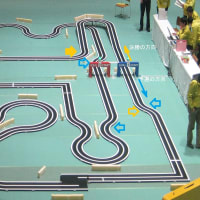
RoboRAVE 2016 に向けて(Line following)
マイコンカーで培った技術は、こんな場面でも活かされると感じました。
マイコンカーでは2つのアナログ光センサを使って一つのサーボモータを制御しています。
EV3ロボットでは、今まで2つのアナログ光センサで2つの走行モータを制御していました。
今回は、光センサを1つに減らして、ライントレースすることに挑戦してみました。
P制御だけでは、なかなかスピードがでなかったのですが、
PID制御することで、ある程度速くなりました。
まだまだ滑らかとは、言えませんが調整によっては、もっともっと良くなりそうです。
皆さんもチャレンジしてみて下さい。
マイコンカーで培った技術は、こんな場面でも活かされると感じました。
マイコンカーでは2つのアナログ光センサを使って一つのサーボモータを制御しています。
EV3ロボットでは、今まで2つのアナログ光センサで2つの走行モータを制御していました。
今回は、光センサを1つに減らして、ライントレースすることに挑戦してみました。
P制御だけでは、なかなかスピードがでなかったのですが、
PID制御することで、ある程度速くなりました。
まだまだ滑らかとは、言えませんが調整によっては、もっともっと良くなりそうです。
皆さんもチャレンジしてみて下さい。







※コメント投稿者のブログIDはブログ作成者のみに通知されます