








サーボが届きました。
注文してたったの2日後には山梨からブツが届きます。便利過ぎる;
サーボも前回使用していた物より更に小さいものがあると情報が入り、
早速色々各試しに注文してみました。(後のしきしまにも使えるので)
前回使用していたのは一番右の『9g』のヤツです。
今回またあのずっとくるくる回り続けるサーボの改造をやらねばいけないので、せっかくならと思い改造方法をUPしたいと思います^^
※はじめにお断り致しますが、今回ご紹介するやり方で、失敗したり事故があったり悔やんだりしても、当方は責任負えませんので、参考になさっても自己責任でお願いしますm(__)m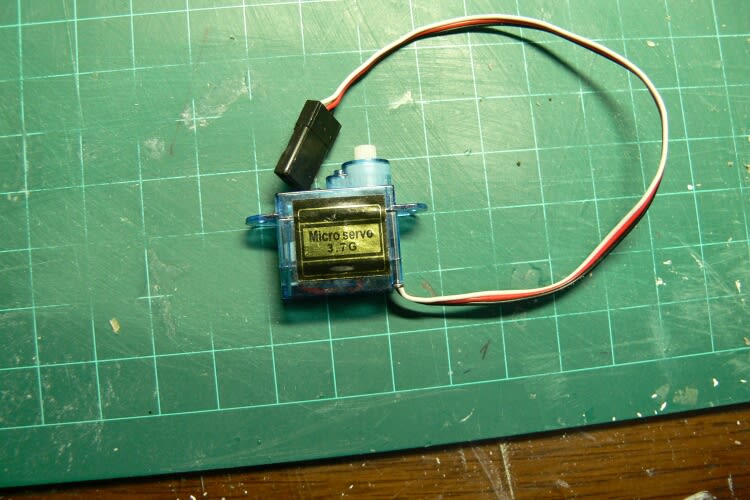
今回レーダー用のサーボに採用したのは一番小さいサーボ。
モーターもそれなりに小さいので消費電力が低いかなと思い、コレに。
まず、今回の改造の概要的には、『サーボの軸とサーボ内の角度センサーとのリンケージを断ち切り、角度センサーは中立位置で固定する』というやり方です。
他にもなんかの抵抗を付け加えたりするやり方もありますが、そっちは部品も要るし、ちょっと高度で私にはわかりません;
ただ、今回のやり方でやると、毎回スイッチを入れる度に若干の誤差が出る場合が
ありますので、使う用途等によっては注意が要ります。
まずは分解からですが、このギアの部分は初めに写真に撮っておいた方が、後々混乱せずに組み立てられますよ。
(この改造法は、他のサーボにも応用効きます。)
一番左がモーター。 一番右のケース内の黒いヤツがこのサーボの角度センサー。
初めは上の軸とガッチリと繋がっています。
この時点で、一度受信機にサーボを繋ぎ、中心(中立位置)の位置出しをします。
センサーを右に回したり、左に回したりするとモーターが回ります。モーターが完全に停止する場所を探します。(大体真ん中付近。)
※9gのタイプだと、一つのギアに過回転防止の爪が付いていて、それをカットする作業が含まれますが、このサーボには爪がありませんでした。
中立位置が見つかれば、その位置でセンサーが動かなくなるようにセンサー部に瞬間接着剤等を流し込み完全固定させます。
【通常サイズのサーボ無限回転化】
(通常サイズのサーボだと、ここでセンサーを固定しなくとも、ギアの内側を加工すればセンサーは回らずギアだけ回ります。 センサーの頭を細工してマイナスの形にでもして、後々精密ドライバー等がサーボ軸内を通るようにしておけば、分解せずにマイナスドライバーでその都度に中心位置微調整したりもできます。 まぁプロポのトリムでも調整はできます。)判りにくい文章ですみません。
センサーとセンサー上の歯車とのリンケージの軸は、上の歯車が空回りするように軸を加工します。
(軸を研磨加工するか、もしくは穴の方を広げるかはモノ次第です。)
こんな感じに。
あとは接着剤の乾燥を待ち、元通りに組直すと完成です☆
私のひごかぜの場合は、レーダー用として右回転しか求めないので、プロポのON-OFFスイッチchにあてがってますが、
仮にスティックのchにあてがった場合は、片方にスティックを倒せばその方向に永遠に回転し続けますし、
もう片方に倒しても逆方向に永遠に回転し続けます。その回転速度もスティックを倒した分だけ早くなったり遅くなったり。
※一聞は便利そうですが、緻密に設定しないと場合によってはギミックを破壊するただの凶器と化す可能性もあります。
設定とは、プロポのトリム調整で微妙な中心出しをしたり、TRV ADJ.の設定をしたり。
さて今回レーダーの再搭載なのですが、右が前作、左が最新作・・・
なんだったのでしょう・・このやる気の違い・・・;
レーダーリメイク終了。 以前のようなレスポンスを取り戻しました☆
ただ今回、レーダーが若干『ビビリ』ます。小さいサーボでトルクが無いからでしょう。
しかし、1mも離れれればそのビビリも判らなくなる程度のなで、このままで良しとします^^;