マイコン(Arduino)でFTdx10 のCAT制御(その1)ではバンド切替えにブレッドボードに刺したタクトスイッチを使いましたが、実装となるとバンドの数だけこのスイッチとマイコンの入力が必要になり現実的ではありません。
マイコンの入力数は、今使っているATmega382ではデジタル入力が12個、アナログ入力が6個なので(アナログ入力はデジタル入力に変えられる)、かなり絞り込む必要があります。
そこで FTdx3000 などではバンド切替えに3×4キーパッドを使っていますが、これに倣ってここでは安価に入手できる4×4キーパッドを使うことにしました。
現在安価に入手できるのは次の2つぐらいしかないのですが、左のプラ仕様のものはタッチが結構重く上から押さないと動きません。右のパッドは比較的タッチが軽く前から押しても良さそうなのでこちらを使うことにしました。

4×4キーパッドの使い方については参考資料がネットに多くあるので、動作原理など分からなくてもすぐ使えると思いますが、一応基本動作を確認してみました。
ここで使った4X4キーパッドの端子は、左側4個が「列、1~4」、右側4個が「行、5~8」になっています。

いま端子1(一番左、1列目)に5Vをつなげ「1」を押すと端子5(1行目)が5Vになります(赤LED)。

続いて下の「4」を押すと端子6(2行目)が5Vになります(黄LED)。

この様に行(行、列どちらでもいい)に順番に5Vを加え、その間にボタンが押された時の列(または行)を検出すれば、押したボタンが分かるという仕組みですが、このルーチン はArduino IDE でライブラリイが使えるので簡単に書くことができます(ここでは設定方法など省略)。
4X4キーパッドへのキーの割り当てですが、まずバンド切替えとして「1」~「9」に 3.5メガ~50メガを(1.9、5メガ、GENは除く)、最下段の「*」はMWに割り当てました。また右端の列、「A」、「B」、「C」、「D」はそれぞれメーター選択、モード、IPO、ルーフィングフィルターの選択切替を割り当てています。
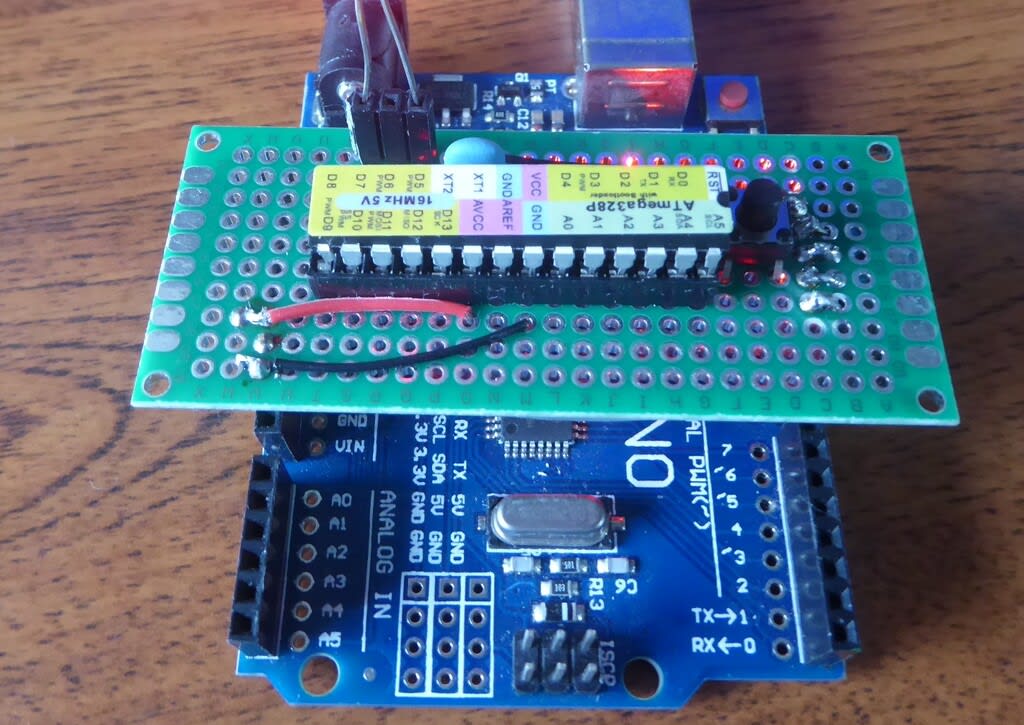
これ以外で常時使うものとして、送信電力とCWキーイングスピードについてはアナログ入力を使ってボリュームで変えることにしました。なおマイコンには当初使っていたUNO(互換品)から Serialラインを切替えるために Atmega328P とTTL-USBコンバーターを基板上に配置した自作品に変えました。

以上の割り当てでATmega328P の8個のデジタル入力と2個のアナログ入力を使うことになり、残りはデジタル入力4個とアナログ入力4個(もしくはデジタル6個)となりました。
マイコン(Arduino)でFTdx10のCAT制御 シリーズ記事