









まだ胸部と腰部、しかも粗造りもいいところまでしかできていないにもかかわらず、この機体が一体どんな完成イメージになるのか大まかなイメージを見たくなり、現状で代用できる部品を集めて一応の形を作ってみました。
今回は以前ガレージキットで出しておりました『タツノマ』ならびに『アクリス』と、いまだ完成に至らぬ『ヒテン』の原型パーツを使用してまだ製作していない腕と脚の代わりにしています。実際の完成デザインとは細部や接続位置等が異なりますのでご注意下さい…というか、まだ実際の完成品がどんなデザインでどんな接続位置を取るのかさえ決まっていない段階なのですが…。
こういう時フォトレタッチソフトがあると大変便利でして、腕や脚は片方さえあれば左右反転コピーで両腕脚が調達できてしまいます。そんなこんなでPC上で組み立てた“仮想”完成イメージがこちら↓

この段階で全高はおよそ32cm。予想以上にデカくなってしまいました。
まぁこれはあくまで『タツノマ』や『ヒテン』を換装すると…という仕様となるため、言うならば今回作るロボットの強化バージョン(『グレート○○』というパターンね)のプロポーションですので、今度はこれを素材に各所を切り詰め構成し直し、実際の商品プロポーションを想定したものを作ってみます。

ちょっとこじんまりしましたね(笑)。
まだ多少細部の寸法は違ってくることとなるでしょうが、個人的にはこのくらいのシンプルさと大雑把さを持ったロボットを作っていく予定であります。
ついでにコックピットと頭部の取り付け位置に関しても少々…。
胸部にコックピットがある関係上、また、そのための巨大化を各所の切り詰めによってボリュームダウンを図った結果どうしても肩がややなで肩気味になることが避けられません。また現状ではフィギュアを完全格納するとどうしても更なる巨大化が発生してしまう可能性があります。
フィギュアを収めるため脚の収納位置を前方にシフトするとどうしても機体のお腹が太鼓腹形状になってしまいますし、機体の胸部・前後を無理にスリム化すると腰の可動を犠牲にする結果になってしまいます。
そこで色々検討した結果、コックピットを後方にシフトし、フィギュアが機体に背負われるようなイメージでの着座形態にすることにしました。結果、フィギュアの頭部はロボットの頭部後方に露出する形になるのですが、これが案外演出的に格好良くなるのでは?と考え、この線で制作することと致しました。
元よりロボットのプロポーションはやや背むし気味にする方針でしたので、デザイン上でも破綻無くうまくフィギュアのスペースを逃がせることが出来るのではないかと現段階では判断しております。
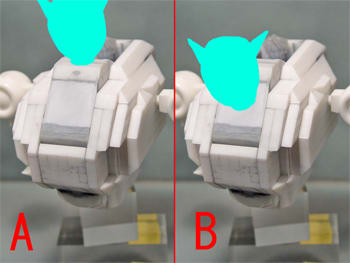
ちなみに、上画像(A)は普通のプロポーション位置に頭部を配置した場合。ご覧の通りかなりのなで肩さんになってしまいます。
背むし気味の(B)位置の方がプロポーションとしては落ち着くのが分かると思います。
後方でちらりと覗くミゼットの頭が「搭乗してる感」をより際立たせているようにも思えますが、悪く言えば完全に子守の乳母状態ですね…今思いつきで考えたのですがこのロボット、妖精らしく『スプリガン』とでも命名するか…?
…てなわけで、インターバルを兼ねてイメージ検討をしてみたわけですが、本当はこういう風に作業が中途の状態で欲求を満たすような行為は決して良くは無いのです。それは中途半端に欲求が満たされてしまうと作業を進める気力が萎えてしまう恐れがあるから。
とりわけ私は根性無しですので餌を与えてしまうとすぐ足を止めてしまう傾向があるため、本来ならばとことんストイックな環境に落とし入れておかないと仕事なんかやりゃあしませんので(笑)。
さぁ、明日から心を入れ替え再び作業再開だぁ!!!!!!!!!!
…はぁ(嘆息)。
今回は以前ガレージキットで出しておりました『タツノマ』ならびに『アクリス』と、いまだ完成に至らぬ『ヒテン』の原型パーツを使用してまだ製作していない腕と脚の代わりにしています。実際の完成デザインとは細部や接続位置等が異なりますのでご注意下さい…というか、まだ実際の完成品がどんなデザインでどんな接続位置を取るのかさえ決まっていない段階なのですが…。
こういう時フォトレタッチソフトがあると大変便利でして、腕や脚は片方さえあれば左右反転コピーで両腕脚が調達できてしまいます。そんなこんなでPC上で組み立てた“仮想”完成イメージがこちら↓
この段階で全高はおよそ32cm。予想以上にデカくなってしまいました。
まぁこれはあくまで『タツノマ』や『ヒテン』を換装すると…という仕様となるため、言うならば今回作るロボットの強化バージョン(『グレート○○』というパターンね)のプロポーションですので、今度はこれを素材に各所を切り詰め構成し直し、実際の商品プロポーションを想定したものを作ってみます。
ちょっとこじんまりしましたね(笑)。
まだ多少細部の寸法は違ってくることとなるでしょうが、個人的にはこのくらいのシンプルさと大雑把さを持ったロボットを作っていく予定であります。
ついでにコックピットと頭部の取り付け位置に関しても少々…。
胸部にコックピットがある関係上、また、そのための巨大化を各所の切り詰めによってボリュームダウンを図った結果どうしても肩がややなで肩気味になることが避けられません。また現状ではフィギュアを完全格納するとどうしても更なる巨大化が発生してしまう可能性があります。
フィギュアを収めるため脚の収納位置を前方にシフトするとどうしても機体のお腹が太鼓腹形状になってしまいますし、機体の胸部・前後を無理にスリム化すると腰の可動を犠牲にする結果になってしまいます。
そこで色々検討した結果、コックピットを後方にシフトし、フィギュアが機体に背負われるようなイメージでの着座形態にすることにしました。結果、フィギュアの頭部はロボットの頭部後方に露出する形になるのですが、これが案外演出的に格好良くなるのでは?と考え、この線で制作することと致しました。
元よりロボットのプロポーションはやや背むし気味にする方針でしたので、デザイン上でも破綻無くうまくフィギュアのスペースを逃がせることが出来るのではないかと現段階では判断しております。
ちなみに、上画像(A)は普通のプロポーション位置に頭部を配置した場合。ご覧の通りかなりのなで肩さんになってしまいます。
背むし気味の(B)位置の方がプロポーションとしては落ち着くのが分かると思います。
後方でちらりと覗くミゼットの頭が「搭乗してる感」をより際立たせているようにも思えますが、悪く言えば完全に子守の乳母状態ですね…今思いつきで考えたのですがこのロボット、妖精らしく『スプリガン』とでも命名するか…?
…てなわけで、インターバルを兼ねてイメージ検討をしてみたわけですが、本当はこういう風に作業が中途の状態で欲求を満たすような行為は決して良くは無いのです。それは中途半端に欲求が満たされてしまうと作業を進める気力が萎えてしまう恐れがあるから。
とりわけ私は根性無しですので餌を与えてしまうとすぐ足を止めてしまう傾向があるため、本来ならばとことんストイックな環境に落とし入れておかないと仕事なんかやりゃあしませんので(笑)。
さぁ、明日から心を入れ替え再び作業再開だぁ!!!!!!!!!!
…はぁ(嘆息)。














