








久しぶりの投稿となりましたが、何とかログインできました。
いろいろ細々とやっていましたが、Jetson nanoで物体検出+カメラ追尾ができたので、メモを残しておきます。
まずは、人物(person)を認識してwebカメラが動いている様子です。
椅子に座って、ディスプレイをスマホで映していますが、良く見ると少し遅れて追尾しているのがわかります。
全体の構成です。
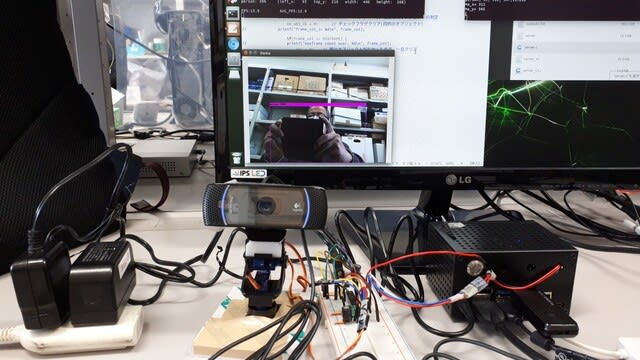
物体検出はAlexeyAB Darknet YOLOv4で動かしています。今のところ、オリジナルのYOLOv4を使っています。(追記:yolov4-tinyです)
検出した複数のオブジェクトごとに、検出面積の一番大きいオブジェクトをDarknet内で計算して別プログラムに送り、そこで指定したオブジェクト(person)の座標をUARTから出力します。
Webカメラです。白い台座はサーボの雲台に取り付けるための治具です。3Dプリンターで作りました。

Jetson nanoです。UARTと+3.3Vを引き出しています。

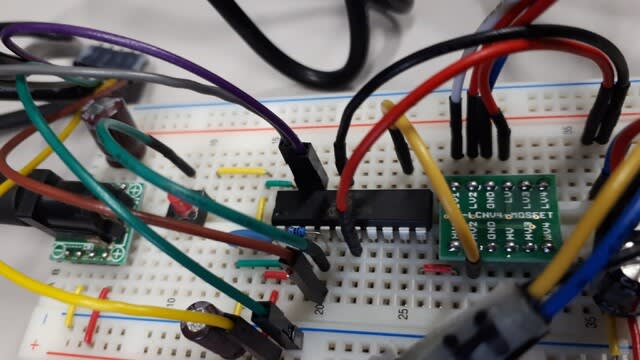
Jetson nanoからのX、Yの座標情報を受けて、サーボを動かすPICです。右側の緑の基板はJetson nanoからのUART 3.3VをPIC、サーボ側の5Vに変換する秋月電子のレベル変換基板です。
メモのために、プログラムをアップロードしたかったのですが、久しぶりの投稿なのでアップロードの仕方がわかりません。
アップロード方法がわかりましたら、別途投稿します。(追記:goo blogではテキストファイルなどのアップロードはできないようです)
いろいろ細々とやっていましたが、Jetson nanoで物体検出+カメラ追尾ができたので、メモを残しておきます。
まずは、人物(person)を認識してwebカメラが動いている様子です。
椅子に座って、ディスプレイをスマホで映していますが、良く見ると少し遅れて追尾しているのがわかります。
全体の構成です。
物体検出はAlexeyAB Darknet YOLOv4で動かしています。今のところ、オリジナルのYOLOv4を使っています。(追記:yolov4-tinyです)
検出した複数のオブジェクトごとに、検出面積の一番大きいオブジェクトをDarknet内で計算して別プログラムに送り、そこで指定したオブジェクト(person)の座標をUARTから出力します。
Webカメラです。白い台座はサーボの雲台に取り付けるための治具です。3Dプリンターで作りました。
Jetson nanoです。UARTと+3.3Vを引き出しています。
Jetson nanoからのX、Yの座標情報を受けて、サーボを動かすPICです。右側の緑の基板はJetson nanoからのUART 3.3VをPIC、サーボ側の5Vに変換する秋月電子のレベル変換基板です。
メモのために、プログラムをアップロードしたかったのですが、久しぶりの投稿なのでアップロードの仕方がわかりません。
アップロード方法がわかりましたら、別途投稿します。(追記:goo blogではテキストファイルなどのアップロードはできないようです)










※コメント投稿者のブログIDはブログ作成者のみに通知されます