








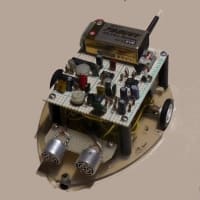
■東京・大阪の小学生が楽しんだ『二足歩行ペーパー・ロボット』です。切り替えスイッチを使って、ロボットを「停止」、「前進」、「後退」させます。

■『二足歩行ペーパー・ロボット』をコンピュータでコントロールしました。
おもちゃコンピュータ(Ichigo Jam)を使ってプログラミング動作させました。このコンピュータの言語はBASICなので、年寄りにピッタリです。これからは、プログラミングが、小学生の教科テーマになりますね。
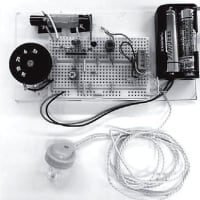
写真は、開発システム一式です。コンピュータとロボットとのインターフェースは、リレー2個で構成しています。ここでは、ロボットにセンサーを付けていないので、障害避難機能がありませんが、追加機能が可能です。ロボット製作とプログラミングの詳細は、『電子工作マガジン30号・31号』(電波新聞社刊)に掲載してありますので、ご覧ください。

■『二足歩行ペーパー・ロボット』をコンピュータでコントロールしました。
おもちゃコンピュータ(Ichigo Jam)を使ってプログラミング動作させました。このコンピュータの言語はBASICなので、年寄りにピッタリです。これからは、プログラミングが、小学生の教科テーマになりますね。
写真は、開発システム一式です。コンピュータとロボットとのインターフェースは、リレー2個で構成しています。ここでは、ロボットにセンサーを付けていないので、障害避難機能がありませんが、追加機能が可能です。ロボット製作とプログラミングの詳細は、『電子工作マガジン30号・31号』(電波新聞社刊)に掲載してありますので、ご覧ください。





※コメント投稿者のブログIDはブログ作成者のみに通知されます