■はじめに
100VのAC水中ポンプを2台交互に動かして水耕栽培の栽培床の養液を入れ替えて野菜を育てる等量交換式水耕栽培という手法があるのですが正確に時間を制御できるタイマースイッチが市販品では見当たらないので自作してみようと思いました。最初はPICマイコンを使用してリレーを制御するスイッチを考えたのですがフィッシャーの古いタイプのシリアルインターフェイスをかなりもっているのでこれを使ってできないかと思い取り組んで見ました。
■使用部品と購入部材
リレーへの入力電圧は入力側は5V±1Vですのでシリアルインターフェイスの入力に6Vアダプターを使用して入力電圧にしました。使用リレーはオムロンのG3MCです。
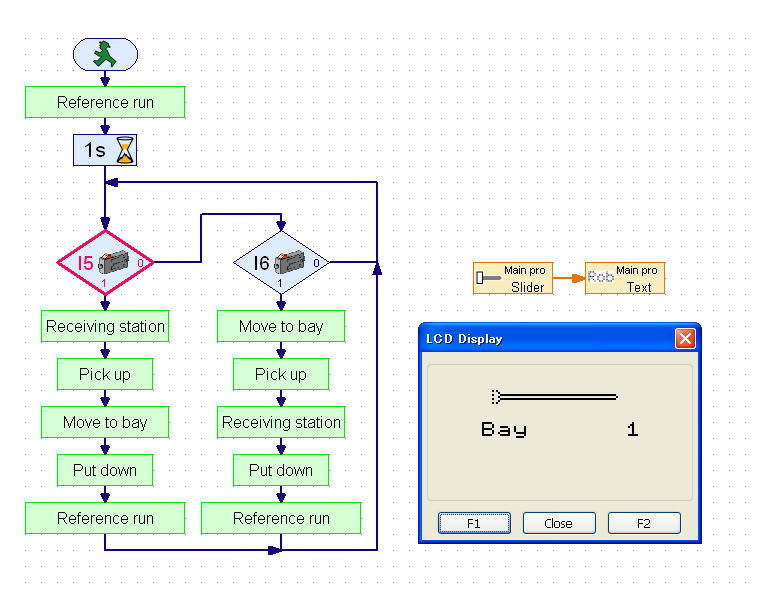
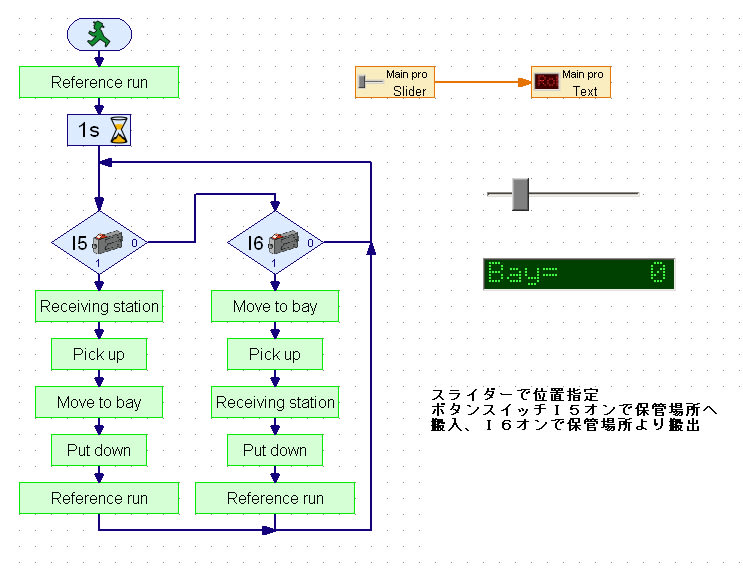
LLWINを使って15秒毎に入り切りする簡単なプログラムを作りライトの点滅でテストをしましたがプログラム通り点滅してくれましたので成功です。

■15分交互入切のタイマーに
プログラムとしては次のようになります。

タイマー設定時間は実際にポンプを動かしポンプの揚水量・排水量を見ながら設定します。
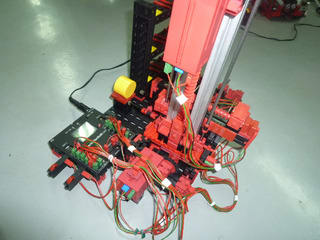
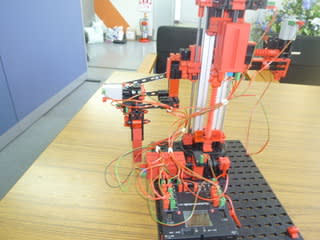
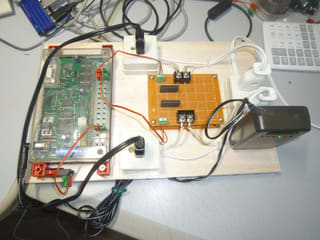
完成したタイマーです。
■等量交換式水耕栽培床に使用
完成したタイマーは等量交換式水耕栽培棚に取り付けて使用しています。