








3-2)赤外線受信プログラム
;*************************************
; 赤外線受信プログラム
;*************************************
; LED-RECV.ASM
LIST P=PIC16F84A;
INCLUDE P16F84.INC;
MEM_1 EQU 0CH
MEM_2 EQU 0DH
MEM_3 EQU 0EH
MEM_4 EQU 0FH
ORG 0
;*****************************
;メインルーチン
;*****************************
MAIN
BSF STATUS,RP0
CLRF TRISB
MOVLW 01H
MOVWF TRISA
BCF OPTION_REG,7
BCF STATUS,RP0
LOOP
CLRF PORTA
CLRF PORTB
CLRF MEM_4
BTFSC PORTA,0
GOTO LOOP
CALL TIM04
BTFSC PORTA,0
GOTO LOOP
CALL TIM02
CALL TIM04
BTFSS PORTA,0
GOTO LOOP
CALL TIM02
CALL TIM04
BTFSC PORTA,0
GOTO LOOP
CALL TIM02
CALL TIM04
BTFSC PORTA,0
GOTO B0
BSF MEM_4,3
B0
CALL TIM02
CALL TIM04
BTFSC PORTA,0
GOTO B1
BSF MEM_4,2
B1
CALL TIM02
CALL TIM04
BTFSC PORTA,0
GOTO B2
BSF MEM_4,1
B2
CALL TIM02
CALL TIM04
BTFSC PORTA,0
GOTO B3
BSF MEM_4,0
B3
CALL TIM02
CALL TIM04
BTFSC PORTA,0
GOTO LOOP
CALL TIM02
CALL TIM04
BTFSS PORTA,0
GOTO LOOP
CALL TIM02
CALL TIM04
BTFSC PORTA,0
GOTO LOOP
CALL TIM02
CALL TIM04
BTFSS PORTA,0
GOTO LOOP
CALL TIM02
CALL TIM04
BTFSC PORTA,0
GOTO LOOP
DECFSZ MEM_4,1
GOTO C0
GOTO Label0
C0
DECFSZ MEM_4,1
GOTO C1
GOTO Label1
C1
DECFSZ MEM_4,1
GOTO C2
GOTO Label2
C2
DECFSZ MEM_4,1
GOTO C3
GOTO Label3
C3
DECFSZ MEM_4,1
GOTO C4
GOTO Label4
C4
DECFSZ MEM_4,1
GOTO C5
GOTO Label5
C5
DECFSZ MEM_4,1
GOTO C6
GOTO Label6
C6
DECFSZ MEM_4,1
GOTO LOOP
GOTO Label7
Label0
MOVLW 02H
MOVWF PORTA
MOVLW 0AH
MOVWF PORTB
CALL TIM100
GOTO LOOP
Label1
MOVLW 02H
MOVWF PORTA
MOVLW 09H
MOVWF PORTB
CALL TIM100
GOTO LOOP
Label2
MOVLW 02H
MOVWF PORTA
MOVLW 06H
MOVWF PORTB
CALL TIM100
GOTO LOOP
Label3
MOVLW 02H
MOVWF PORTA
MOVLW 08H
MOVWF PORTB
CALL TIM100
GOTO LOOP
Label4
MOVLW 02H
MOVWF PORTA
MOVLW 02H
MOVWF PORTB
CALL TIM100
GOTO LOOP
Label5
MOVLW 02H
MOVWF PORTA
MOVLW 05H
MOVWF PORTB
CALL TIM100
GOTO LOOP
Label6
MOVLW 02H
MOVWF PORTA
MOVLW 04H
MOVWF PORTB
CALL TIM100
GOTO LOOP
Label7
MOVLW 02H
MOVWF PORTA
MOVLW 01H
MOVWF PORTB
CALL TIM100
GOTO LOOP
;*****************************
;200μs
;*****************************
TIM02
MOVLW 07CH
MOVWF MEM_1
TIMLP1 NOP
DECFSZ MEM_1,F
GOTO TIMLP1
RETURN
;*****************************
;400μs
;*****************************
TIM04
MOVLW 0F9H
MOVWF MEM_2
TIMLP2 NOP
DECFSZ MEM_2,F
GOTO TIMLP2
RETURN
;*****************************
;0.1s
;*****************************
TIM100
MOVLW 0F9H
MOVWF MEM_3
TIMLP3 CALL TIM04
DECFSZ MEM_3,F
GOTO TIMLP3
RETURN
END
最新の画像[もっと見る]
-
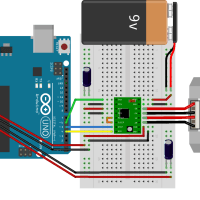 ArduinoUNO+A4988でステッピングモータを回す
10年前
ArduinoUNO+A4988でステッピングモータを回す
10年前
-
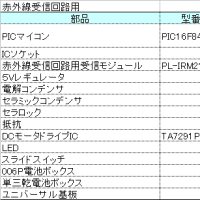
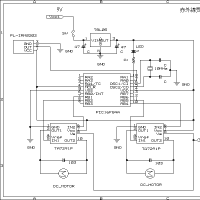 PICマイコンを利用した赤外線コントロール戦車の製作
10年前
PICマイコンを利用した赤外線コントロール戦車の製作
10年前
-
 PICマイコンを利用した赤外線コントロール戦車の製作
10年前
PICマイコンを利用した赤外線コントロール戦車の製作
10年前
-
 PICマイコンを利用した赤外線コントロール戦車の製作
10年前
PICマイコンを利用した赤外線コントロール戦車の製作
10年前
-
 PICマイコンを利用した赤外線コントロール戦車の製作
10年前
PICマイコンを利用した赤外線コントロール戦車の製作
10年前
-
 PICマイコンを利用した赤外線コントロール戦車の製作
10年前
PICマイコンを利用した赤外線コントロール戦車の製作
10年前
-
 PICマイコンを利用した赤外線コントロール戦車の製作
10年前
PICマイコンを利用した赤外線コントロール戦車の製作
10年前
-
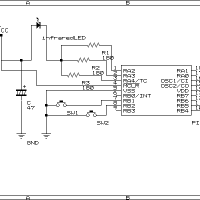
 PIC16F84による赤外線送信回路について
10年前
PIC16F84による赤外線送信回路について
10年前
-
 PIC16F84による赤外線送信回路について
10年前
PIC16F84による赤外線送信回路について
10年前
-
 PIC16F84による赤外線送信回路について
10年前
PIC16F84による赤外線送信回路について
10年前