








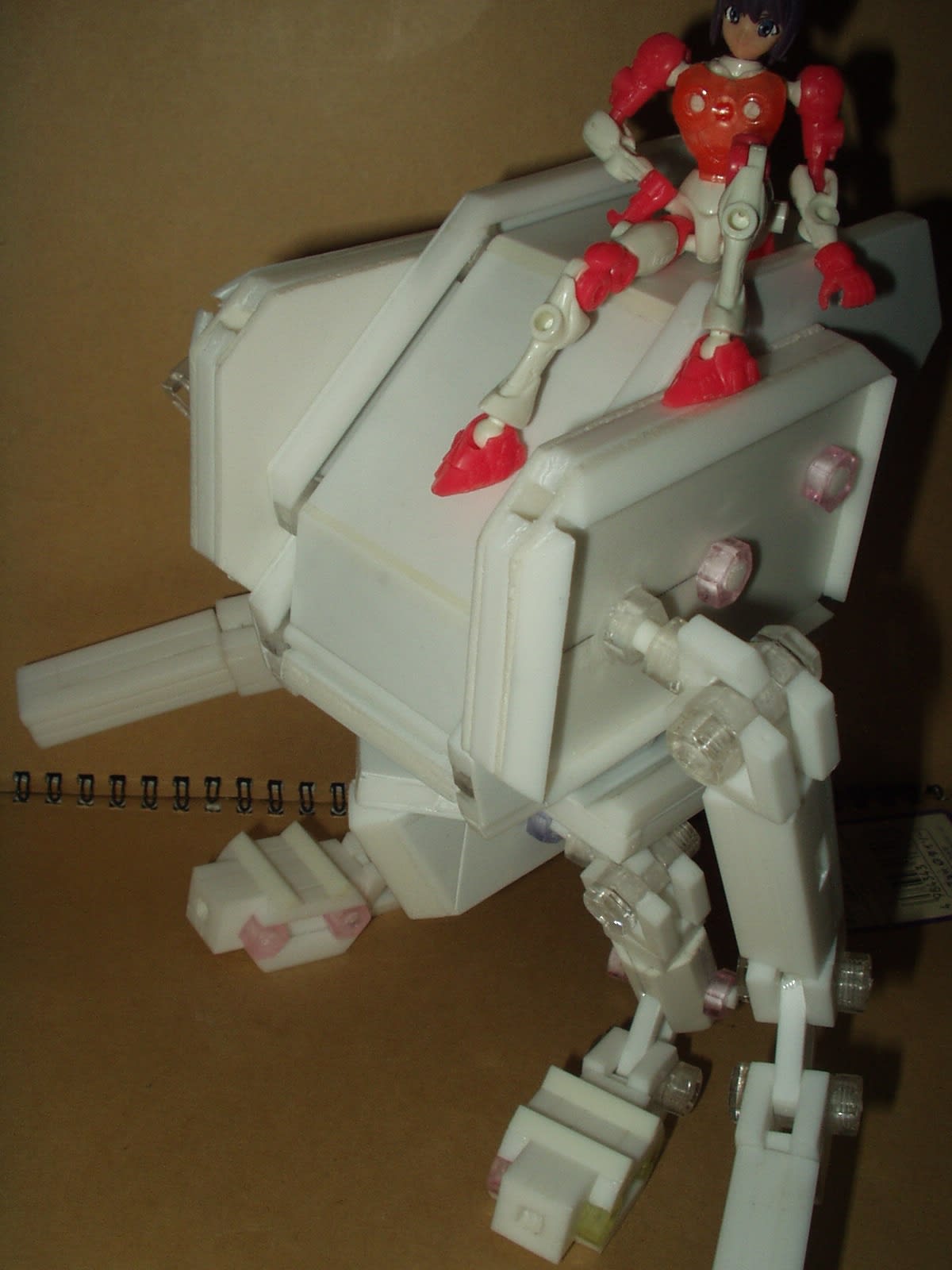
目指してるのはウォーカーマシン。
土木作業に適した形。
重心を低くしてなるべくこけにくいように。
ビークルが中に収納されるように。
はやく手足と外装作ろう。
今回は折角プラナットを入手したので、関節をボルトで締めるようにしました。
前回の5mmジョイントだと自重で崩壊するし。
まだまだ弄る所多くてどうしようか…
目指してるのはウォーカーマシン。
土木作業に適した形。
重心を低くしてなるべくこけにくいように。
ビークルが中に収納されるように。
はやく手足と外装作ろう。
今回は折角プラナットを入手したので、関節をボルトで締めるようにしました。
前回の5mmジョイントだと自重で崩壊するし。
まだまだ弄る所多くてどうしようか…









