VMD形式 めも
MMD板に貼ったものと、ほぼ同内容です。(補間部分を追記してます)
MMDのモデルデータについて語るスレの967を元に、再調査+追記
//// ファイル形式(VMD) ////
// unsigned が付くかどうかは未チェック
// バイナリエディタ用の定義ファイルをそのまま持ってきたので、データ数も構造体に入っていますが、気にしない!
// ヘッダ
struct VMD_HEADER {
char VmdHeader[30]; // "Vocaloid Motion Data 0002"
char VmdModelName[20]; // カメラの場合:"カメラ・照明" // カメラ・照明・アクセサリモードではモデル用のVMDは読めなくなりました(7.10-)
} vmd_header;
// モーションデータ数
//
// キーフレーム数の上限(MMD側で制限):300,000(32bit版), 600,000(64bit版 7.39dot-)
// 上限判定時は、フレーム0にあるキー(デフォルトではモデルのボーン数と同数)もカウントされるので注意
//
struct VMD_MOTION_COUNT {
DWORD Count;// モーションデータ数
} vmd_motion_count;
// モーションデータ
struct VMD_MOTION { // 111 Bytes // モーション
char BoneName[15]; // ボーン名
DWORD FrameNo; // フレーム番号(読込時は現在のフレーム位置を0とした相対位置)
float Location[3]; // 位置
float Rotatation[4]; // Quaternion // 回転
BYTE Interpolation[64]; // [4][4][4] // 補完
} vmd_motion;
// 表情データ数
struct VMD_SKIN_COUNT {
DWORD Count; // 表情データ数
} vmd_skin_count;
// 表情データ
struct VMD_SKIN { // 23 Bytes // 表情
char SkinName[15]; // 表情名
DWORD FlameNo; // フレーム番号
float Weight; // 表情の設定値(表情スライダーの値)
} vmd_skin;
// カメラデータ数
struct VMD_CAMERA_COUNT {
DWORD Count; // カメラデータ数
} vmd_camera_count;
// カメラデータ
struct VMD_CAMERA { // 61 Bytes // カメラ
DWORD FlameNo; // フレーム番号
float Length; // -(距離)
float Location[3]; // 位置
float Rotation[3]; // オイラー角 // X軸は符号が反転しているので注意 // 回転
BYTE Interpolation[24]; // おそらく[6][4](未検証) // 補完
DWORD ViewingAngle; // 視界角
BYTE Perspective; // 0:on 1:off // パースペクティブ
} vmd_camera;
// 照明データ数
struct VMD_LIGHT_COUNT {
DWORD Count; // 照明データ数
} vmd_light_count;
// 照明データ
struct VMD_LIGHT { // 28 Bytes // 照明
DWORD FlameNo; // フレーム番号
float RGB[3]; // RGB各値/256 // 赤、緑、青
float Location[3]; // X, Y, Z
} vmd_light;
// セルフシャドウデータ数
struct VMD_SELF_SHADOW_COUNT {
DWORD Count; // セルフシャドウデータ数
} vmd_self_shadow_count;
// セルフシャドウデータ
struct VMD_SELF_SHADOW { // 9 Bytes // セルフシャドー
DWORD FlameNo; // フレーム番号
BYTE Mode; // 00-02 // モード
float Distance; // 0.1 - (dist * 0.00001) // 距離
} vmd_self_shadow;
//// 補間の補足 ////
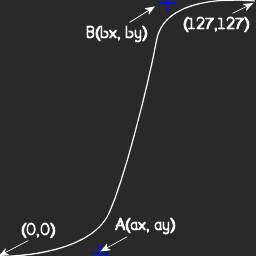
// 補間用の曲線
// (0,0), A(ax,ay), B(bx,by), (127,127) の3次(4点)ベジェ
// A:左下の+, B:右上の+

// モーションの補間パラメータの並び順(MMD板の情報)
// 回転は4軸(クオータニオン)だが、1個にまとめられているので注意
// X軸 Y軸 Z軸 回転
// A (Xax,Xay) (Yax,Yay) (Zax,Zay) (Rax,Ray)
// B (Xbx,Xby) (Ybx,Yby) (Zbx,Zby) (Rbx,Rby)
// とすると、
// Xax,Yax,Zax,Rax, Xay,Yay,Zay,Ray, Xbx,Ybx,Zbx,Rbx, Xby,Yby,Zby,Rby,
// Yax,Zax,Rax, Xay,Yay,Zay,Ray, Xbx,Ybx,Zbx,Rbx, Xby,Yby,Zby,Rby, 01,
// Zax,Rax, Xay,Yay,Zay,Ray, Xbx,Ybx,Zbx,Rbx, Xby,Yby,Zby,Rby, 01,00,
// Rax, Xay,Yay,Zay,Ray, Xbx,Ybx,Zbx,Rbx, Xby,Yby,Zby,Rby, 01,00,00
// カメラの補間(推測)
// モーションの補間と同じ並び順だとすると
// X軸 Y軸 Z軸 回転 距離 視覚野
// A (Xax,Xay) (Yax,Yay) (Zax,Zay) (Rax,Ray) (Lax,Lay) (VAax,VAay)
// B (Xbx,Xby) (Ybx,Yby) (Zbx,Zby) (Rbx,Rby) (Lbx,Lby) (VAbx,VAby)
// の場合、
// Xax,Yax,Zax,Rax,Lax,VAax, Xay,Yay,Zay,Ray,Lay,VAay,
// Xbx,Ybx,Zbx,Rbx,Lbx,VAbx, Xby,Yby,Zby,Rby,Lby,VAby
実験結果:
(MMD 8.03 32bit版、64bit版)
フレーム番号の(表示)最大値:999,999
・フレーム操作欄に数値を直接入力する場合は6桁で制限されます。
・「>」ボタンや右(→)キーなどで表示限界を超えると上6桁のみ表示されます。
・「<」ボタンや左(←)キーなどで(7桁以上から6桁に)戻れます。
・フレーム番号が1,000,000以上の場所にもキーは打てます。