自作のインデューサーポンプ設計ソフトでロケットターボポンプのインデューサーポンプ部を設計してみました。
この自作インデューサーポンプ設計ソフトはC++Builderを使って10年ほど前に作成したプログラムです。
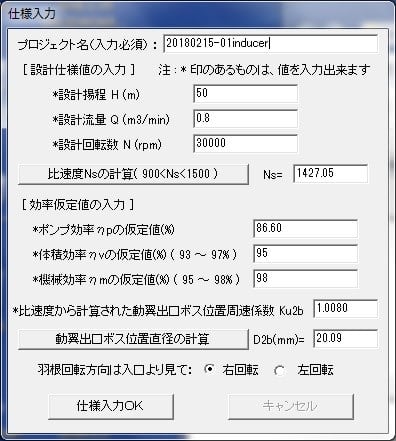
次はインデューサーポンプ設計の基本仕様を入力するダイアログボックスです。
次は、インデューサーポンプの子午面断面形状を入力仕様からプログラミング作成時に内蔵させた設計データベースを使いプログラムが自動生成したものです。
インデューサーポンプの入口口径は20mm程度しかない非常に小型のロケットターボポンプ用のインデューサーとなります。

次は、子午面断面形状上に準3次元流れ解析手法の流線をプログラムが自動生成したものです。
同時に流線上に準3次元流れ計算であ流線曲率法と翼間渦法計算の計算点となるメッシュ点をプログラムが自動生成しています。

次で準3次元流れ計算の結果出た3次元流線上の翼部計算結果が画面の左側に表形式にて出力されています。

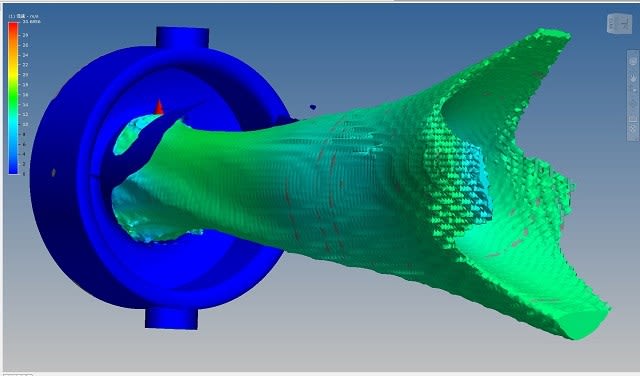
3次元流線上で計算された翼部の計算値から、展開流線からの逆展開計算により翼の3次元形状を生成してOpenGLリアルタイム表示を使って画面に形状を示しています。
この場合の動翼展開角度は240度としています。

次は動翼展開角度を300度として全ての計算を再計算させた結果のインデューサーポンプ動翼形状であり、動翼展開角が大きいほど緩やかな流れの転向となるためキャビテーションが起きにくくなりますが、あまり大き過ぎてもロスが増えるので適切な値があります。

このロケットターボポンプ用のインデューサーポンプ部設計は、推力5トンクラスの液体酸素ターボポンプ用のインデューサー形状生成となっています。
<今日の流れ>
今日は午前少し用事があり出ていましたが、午後は事務所にて設計作業を行います。